Flightradar24のFeederになる!
概要
航空機から受信したADS-B信号データをラズパイを通してFlightradar24にUploadする手順を解説します。
Flightradar24とは
航空機の位置、高度、目的地、航路などを表示できるサービスです。航空ファンであれば自分の注目する飛行機がどこにいるのか分かるため、エアバンドを聞いたり、航空写真を撮影する場合に便利です(単に見ているだけでも楽しいかもしれません)。航空ファンでなくとも、家族や友人が乗った飛行機が今どこにいるのか知りたい場合に便利です。
WikipediaによるとFlightradar24は元々、スウェーデンの学生2名が始めたADS-B受信網で今では全世界で利用されています。
料金プラン

無課金の場合は広告付きのBasicです。Silver以上で広告が除去できます。
仕組み

航空機はADS-B(Automatic Dependent Surveillance–Broadcast)と呼ばれる信号を常に放送しています。この信号には航空機の現在位置、高度、速度、機体記号などが含まれており、これをFlightradar24サーバーに送信・処理することでMAPに表示しています。ADS-B受信網はFlightradar24が独自に設置したアンテナと、ボランティアが設置したアンテナから成り立っています。
今回はボランティアとしてADS-B信号をFlightradar24にuploadする手順を紹介します。Flightradar24ではこのボランティアをfeeder、uploadをfeedと呼びます。なお、feederの特権として最上位サブスクリプションであるBusinessを無料で利用できるようになります。
feedする2つの方法
feederになるにはFlightradar24から専用機器を無料でレンタルする方法と、自分で一式用意する方法があります。
1. Flightradar24からレンタル


下記のページから申し込むことで、必要な機器(アンテナ、受信機など)を無料でレンタル(?)することができます。
https://www.flightradar24.com/apply-for-receiver
2. 自分で一式用意する方法
必要な機器は一般に販売されているので自分で構成することもできます。以下ではRaspberry Piを使ってADS-B信号を受信しサーバーに送信する手順を説明します。下記は構成例です。

必要品一覧 (URLは例)
- 受信機 (業者のRaspberryスターターキットには以下が含まれるが割高)
- Raspberry Pi 3 Model B 以降 (4 Bがオススメ)
- Raspberry Pi用ケース (Flircがおすすめ)
- micro-SDカード
- 電源アダプタ
- USBハブ (USBドングルが発熱するため, Anker USB hub)
- USBドングル(チューナーRTL-SDR.COM V3 RTL2832U R820T2またはダイポールアンテナキット付きセット セットの場合は、アンテナは別途用意する必要はない)
- アンテナ
- 受信用アンテナ(1090MHz用, Tenmory1090MHz 978MHz Dual Band ADS-B Antenna)
- アンテナケーブル(必要があれば)
- その他必要があれば: イーサーネットケーブル、スイッチングハブなど
システム構成

受信機設定手順
受信機はRaspberryで構成します。Raspberry Pi 3 Model B以降であれば十分ですが、2023年4月時点の最新はRaspberry Pi 4 Model Bなのでこちらをおすすめします。Raspberry PiはAmazonや秋月電子などいろいろな場所で販売されているので、探してみてください。
受信機の設定手順
1. PCにmicor-SDをセットし、Raspberry Pi OSをインストールします。(参照:Raspberry Pi OS – Raspberry Pi)
2. micor-SDをRaspberry Piにセットし電源をONします。(この際、ディスプレイ、キーボード、マウスをつなげておく)
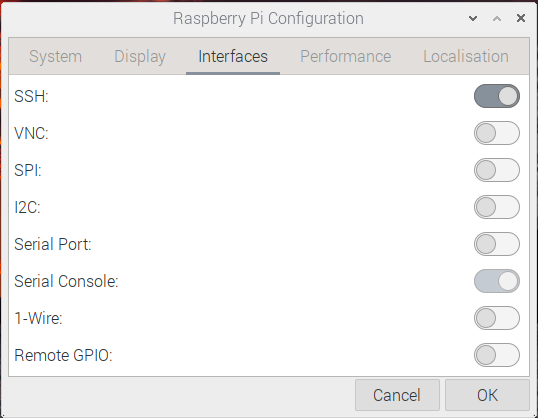
3. Raspberry Pi ConfigurationからSSHを有効化します。これだけでSSHが有効化されます。
4. Network Preferencesから下記の通りIPを固定します。
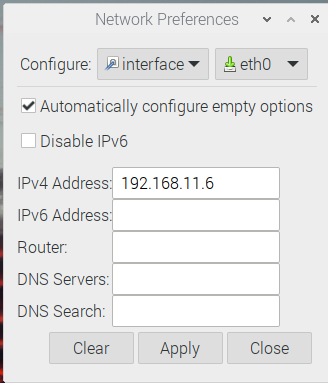
以上により外部からssh user@ipアドレスでログインできるようになります。以降の処理はPCからsshログインして実施します。
5. 必要ソフトのインストール
下記も参照
https://www.flightradar24.com/share-your-data
Flightradar24用ソフトのインストールを実行する前にアンテナ等はすべてつないだ状態にしておきます。
apt update
#ドライバーのインストール
apt install rtl-sdr
# Flightradar24用ソフトのインストール
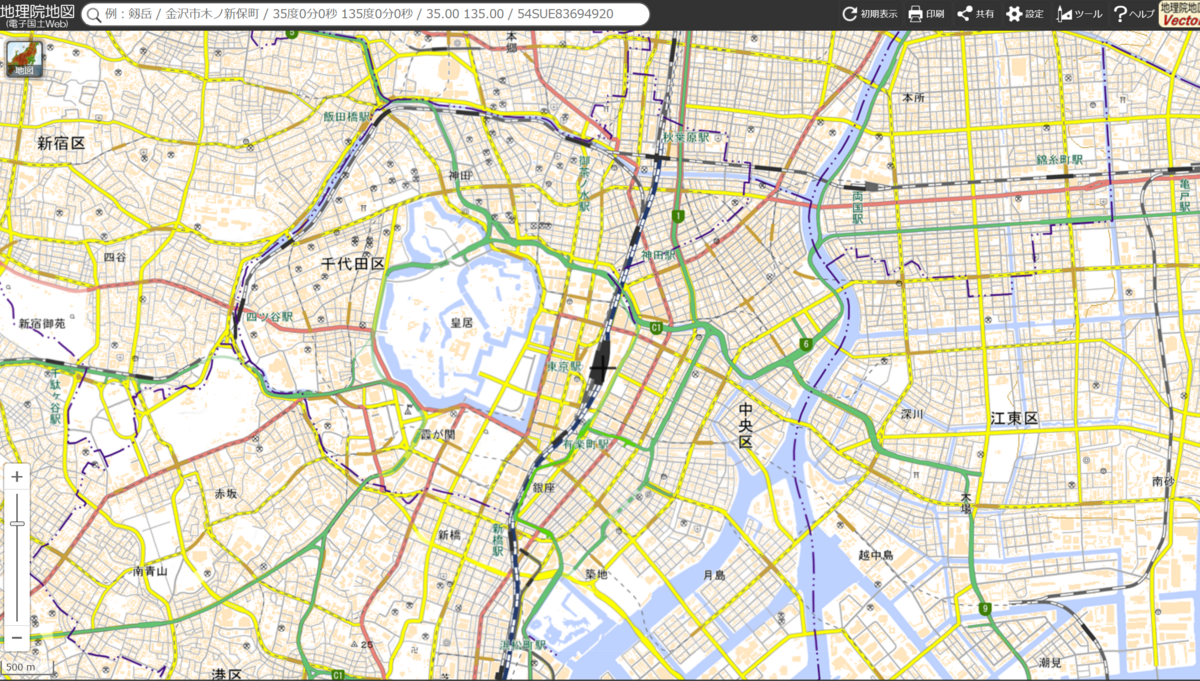
Flightradar24用ソフトインストールの際にはアンテナ設置場所の緯度/経度/標高の入力が必要のため、国土地理院サイトで事前に確認しておきます。
例えば、東京駅の緯度/経度はURLから分かります。(35.681323/139.767410の部分)
Flightradar24インストール時の設定
Step 1.1 - Enter your email address (username@domain.tld)
Flightradar24用のアカウント用メアドを入力(アカウントは事前作成しておく)
Step 1.2 - If you used to feed FR24 with ADS-B data before, enter your sharing key.
以前にfeedしたことがある場合は、sharing keyを入力する。
初めての場合はskip
Step 1.3 - Would you like to participate in MLAT calculations? (yes/no)$:
yesと入力
Step 3.A - Enter antenna's latitude (DD.DDDD)
Step 3.B - Enter antenna's longitude (DDD.DDDD)
Step 3.C - Enter antenna's altitude above the sea level (in feet)
国土地理院で調べた座標を入力する
Step 4.1 - Receiver selection (in order to run MLAT please use DVB-T stick with dump1090 utility bundled with fr24feed):
1を入力
Step 4.3 - Enter your additional dump1090 arguments or leave empty
skip
Step 5.1 - Would you like to enable RAW data feed on port 30002 (yes/no)$:
yesと入力
Step 5.2 - Would you like to enable Basestation data feed on port 30003 (yes/no)$:
yesと入力
Step 6 - Please select desired logfile mode:
2と入力
LinuxのDaemonとして登録されるので、念のため有効化しておきます。
# サービスを有効化する
sudo systemctl enable fr24feed
sudo systemctl status fr24feed
# サービスを無効化する
sudo systemctl disable fr24feed
sudo systemctl stop fr24feed
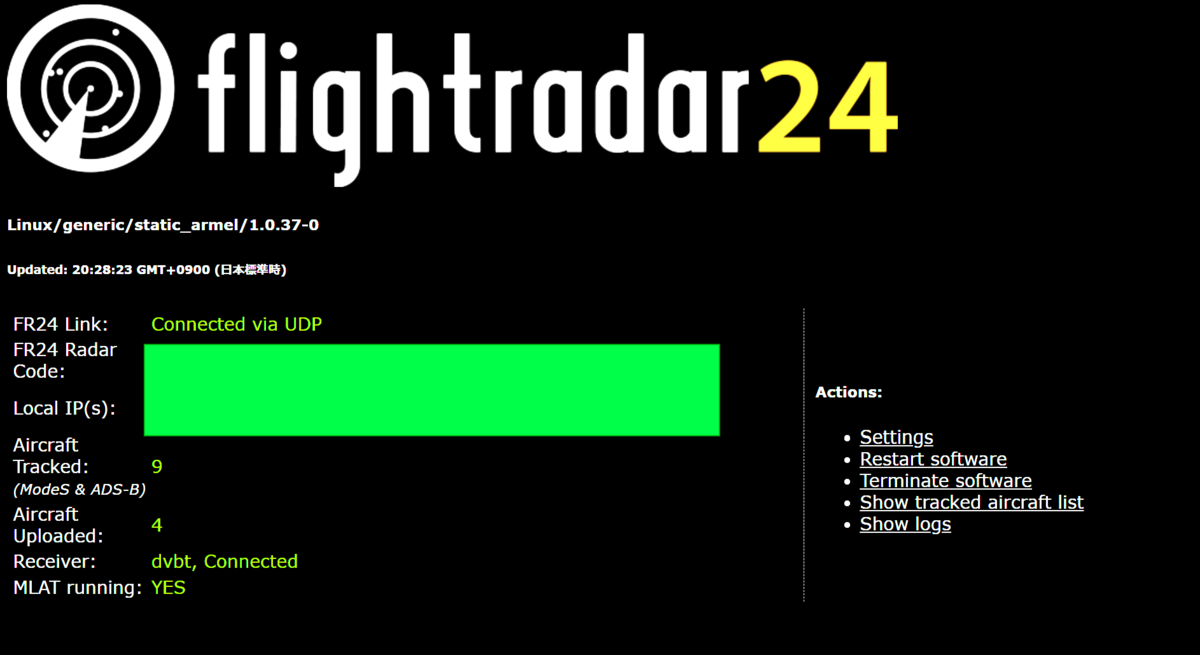
以下にアクセスすると受信状況がわかります。またFlightradar24ではBusinessプランに自動的に切り替わっています。
ブラウザから<Raspberry Piの固定IP>:8754にアクセス
アンテナの設置について
アンテナは屋根の上に設置するのが理想ですが、賃貸やマンションではまず無理です。
その場合は、ベランダにこのとうな取り付け金具を設置し、これにアンテナを設置します。ただこれはケーブルの屋内引き込みが必要です。

https://www.maspro.co.jp/new_prod/kbm45n/index.html
または、下記のような突っ張り棒を、窓辺に縦に設置しそこにアンテナを取り付ける方法もあります。ただし突っ張り棒の用途外使用なので利用は自己責任です。

https://www.nitori-net.jp/ec/product/8542073s/
X-Plane 11 DHC8-Q400 Cold & Darkからエンジン始動~着陸まで

今回はDHC8-Q400をCold & Darkからエンジン始動〜着陸までを順を追って紹介したいと思います。Q400は高翼式の双発ターボプロップ機でコミューター機として多く使われています。前回紹介したSaab 340と違うところはデフォルトでFMS、APUが装備されており高性能な機体です。
機体はXplane 11用にFlyJSimが開発したQ4XPです。実はFlyJSimはQ400を以前にリリースしておりQ4XPはそのアップグレード版です。古い方をQ400 Legacy、新しい方をQ4XPと呼んでいます。ですので購入する際は注意してください。
以下が公式のマニュアルですが、これでは情報不足のため追加の資料をゲットします。
P3D用のQ400であるMajestic Q400の3つマニュアルをダウンロードしてください。
1つ目はQ400のV-speedのチャートです。Metric版をクリックしてダウンロードしてください。
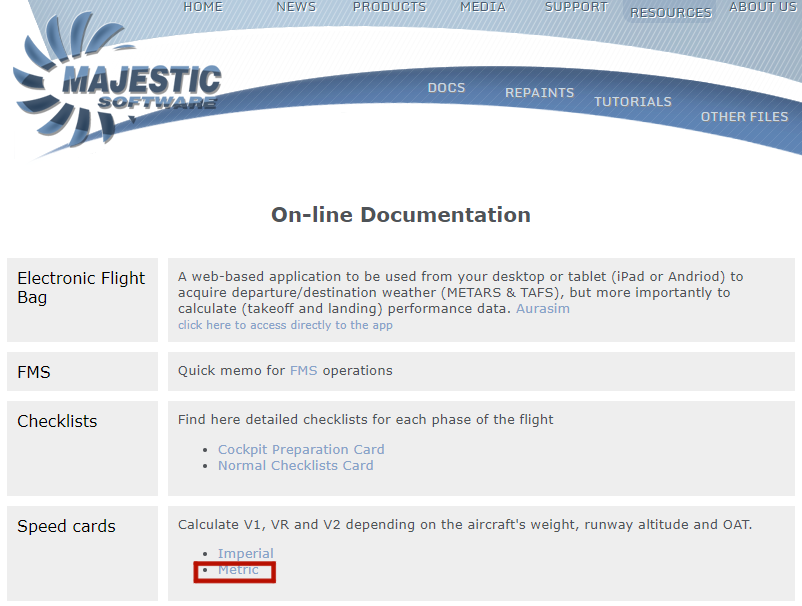
http://majesticsoftware.com/mjc8q400/downloads.html
2つ目はQ400のシステム全般が解説されているマニュアルです。PDFの直リンクです。
「MJC-8 Q400 Normal Operations System Manual」
http://majesticsoftware.com/mjc8q400/docs/SystemDescription.pdf
3つ目は巡航時のトルクを求めるためのチャートです。PDFの直リンクです。
「PerformanceManual」
http://majesticsoftware.com/mjc8q400/docs/PerformanceManual.pdf
今回のフライトプランです。SimBriefで作成しました。
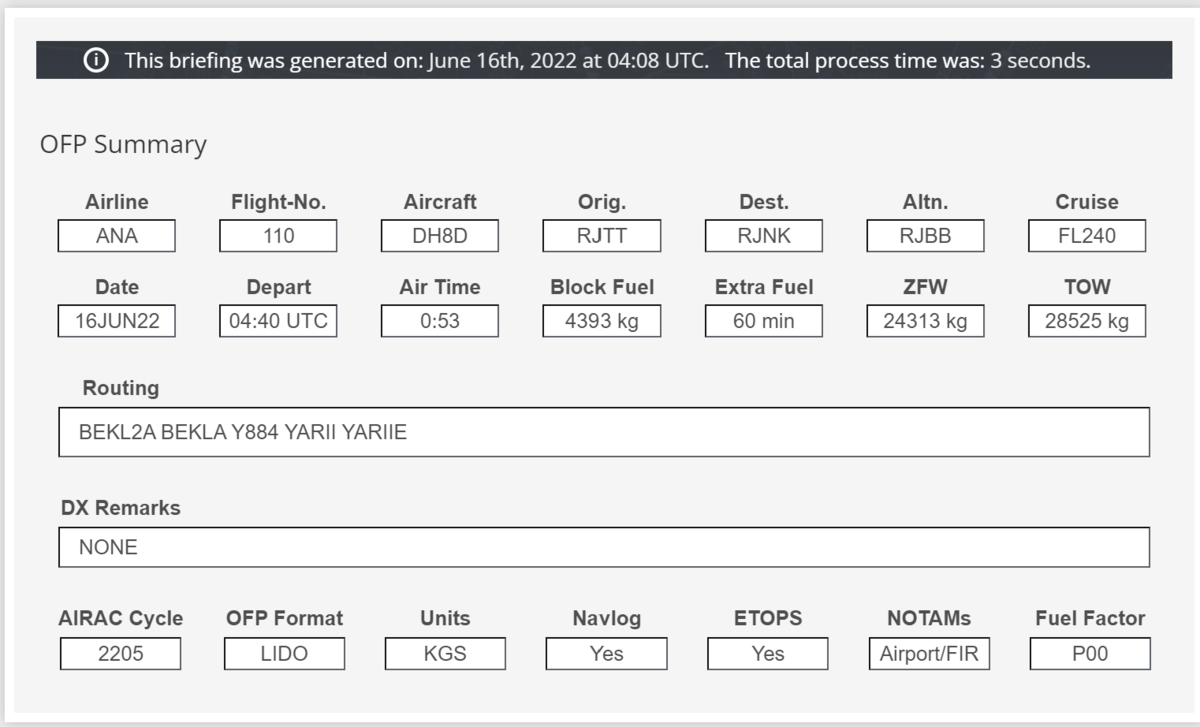
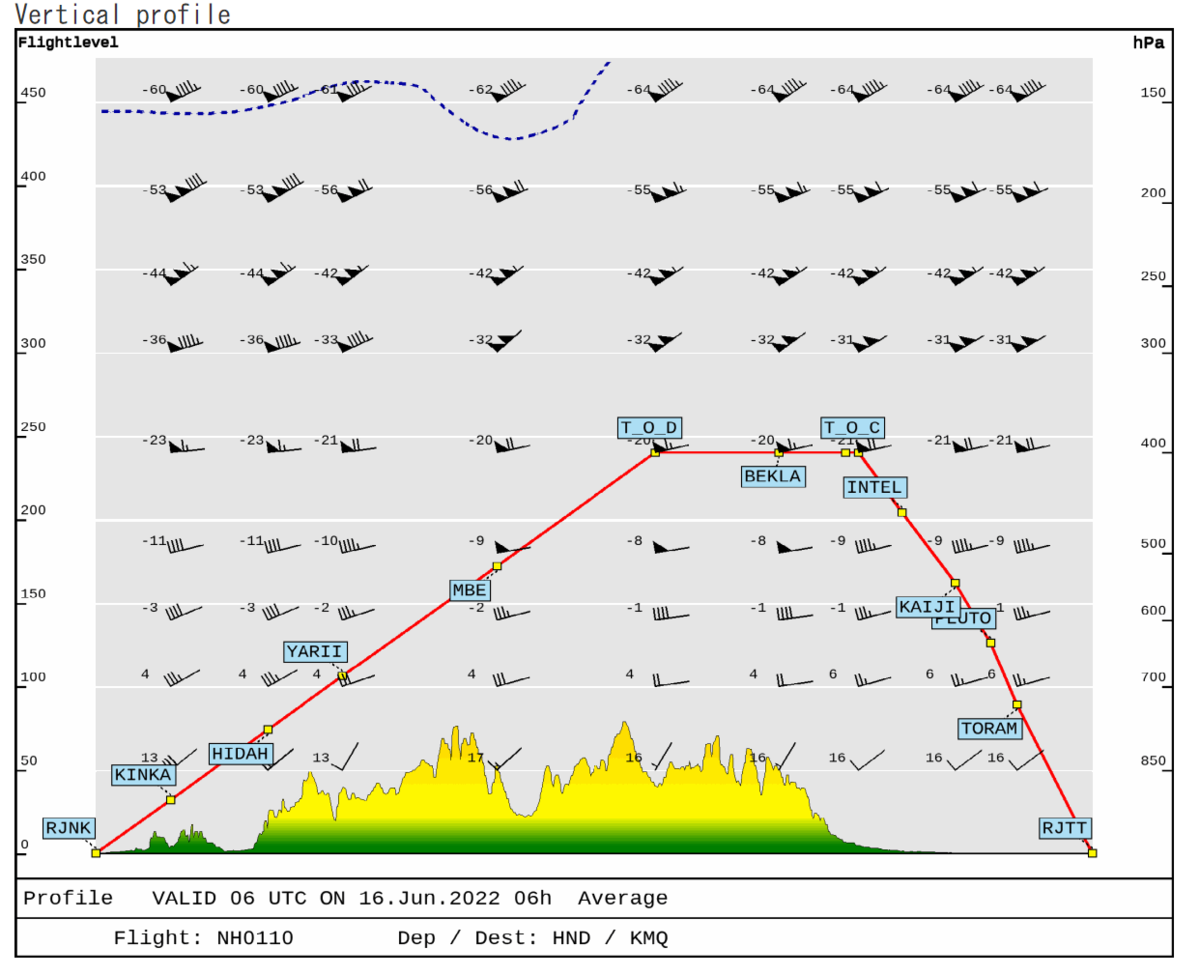
垂直プロファイルです。BEKLA前にT/C、MBEの前にT/Dですが諸事情により今回のフライトは巡航高度をFL220に変更するため降下ポイントがずれます。(上記はFL240の場合の表)

Q400のロード直後です。RJTTの適当なランプに駐機しています。Cold & Dark状態なので電源は入っていません。Cold & Darkから毎回電源を入れるのは面倒な作業の連続ですが、システムの理解と達成感を得られます。

EBFからペイロード、グランドサービスの設定、チェックリストの表示をします。EBFは各アドオンメーカーの特色が出て面白いです。Q4XPの場合は乗客数、貨物はもちろん手動で編集可能ですが、ZFW自体を編集することも可能なので使い勝手が良いです。ZFWを編集する場合は、乗客数、貨物は自動で設定されます。
また、通常チェックリストはPDF形式で添付されることが多いのですが、Q4XPはPDFではなくEBFのみの表示になっています。

Q4XPの設定画面です。デフォルトの機体状態、ステアリング、使用単位などを設定しておきます。一度設定すれば保存されます。
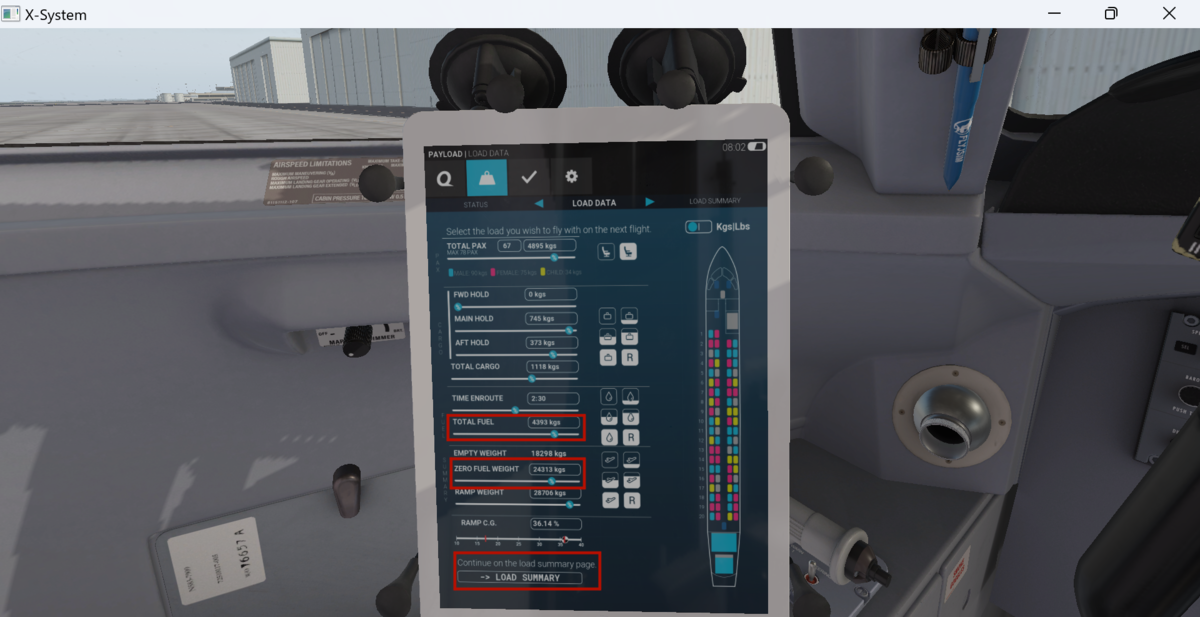
ZFE: 24313 KG
FUEL: 4393 KG
と設定して、LOADします。
乗客数、貨物を手動で設定したい場合は上の方を直接設定してください。ZFWを編集するとそれらは自動的に設定されます。
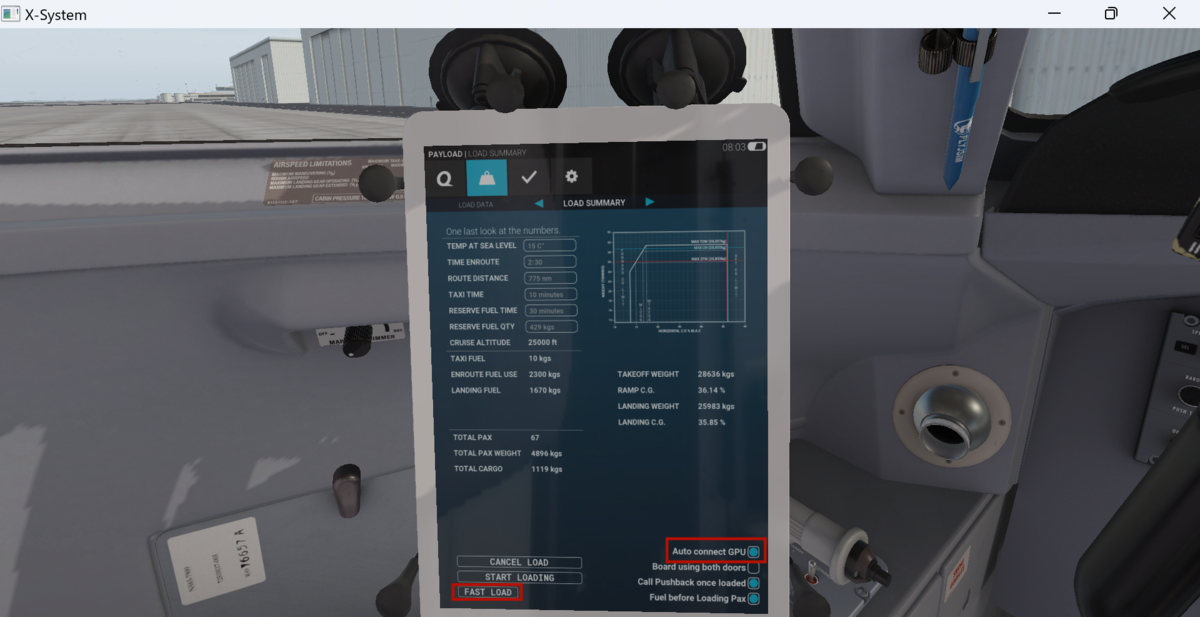
FAST LOADを押すと一瞬で積み込みが完了します。
Auto connect GPUにチェックを入れて自動的にGPUに接続されるようにします。エンジン始動にはGPU or APUが必要ですが今回はGPUのみを使用します。

機体のバッテリーをONにします。STBY, AUX, MAIN, BATTERY MASTERをすべて下に倒してONにします。次にEXT PWRをONにして、外部電源を接続します。
エアラインの場合は整備士の方がバッテリーをつけるくらいはやってくれるのでしょうか、気になります。

空調の設定です。RECYCLIC FANをONにして機体の空気を循環させます。

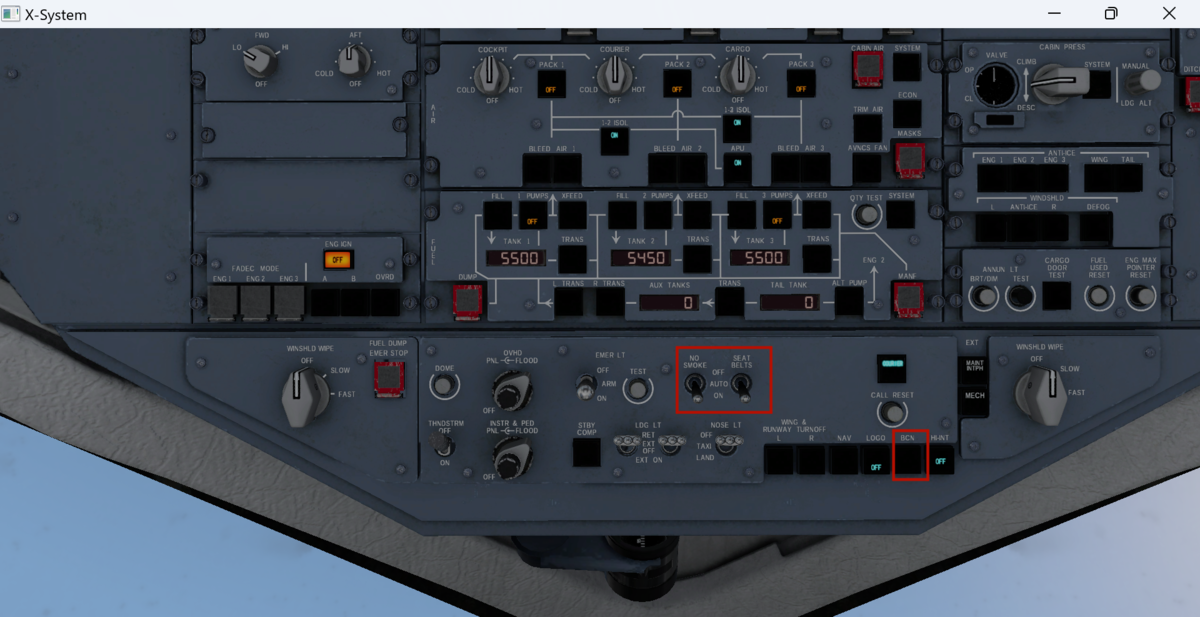
POSN(ポジションライト)、FASTEN BELTS, NO SMOKINGをON、EMERをARMにします。ポジションライトはナビゲーションライト(NAV)とも呼ばれ、主翼の両端が緑と赤にそれぞれ点灯します。右側がみどりと記憶しておきます。機体の電源が入っている間は点灯させる必要があります。
ちなみにアンチコリジョンライトとビーコンライトは同じ意味で、機体の上下のライトが点灯します。なぜ同じ意味で違う名前が使われているのかよくわかっていませんが、始めたのときは分かりづらかったですね。このライトはエンジン起動中はずっと点灯させます。

ANTI SKIDをONにします。ブレーキ使用時にタイヤをロックしないようにするためのものです。これをON/OFFする機体はあまり見たことがないです。ボーイングやエアバスはデフォルトでONだったような気がしています。

バッテリーを接続しただけだとモニターは真っ暗なままなので、モニターの電源を片っ端からONにしていきます。赤字の部分を設定してください。
PFD,MFD, CDU, COM(予備)の電源を入れます。
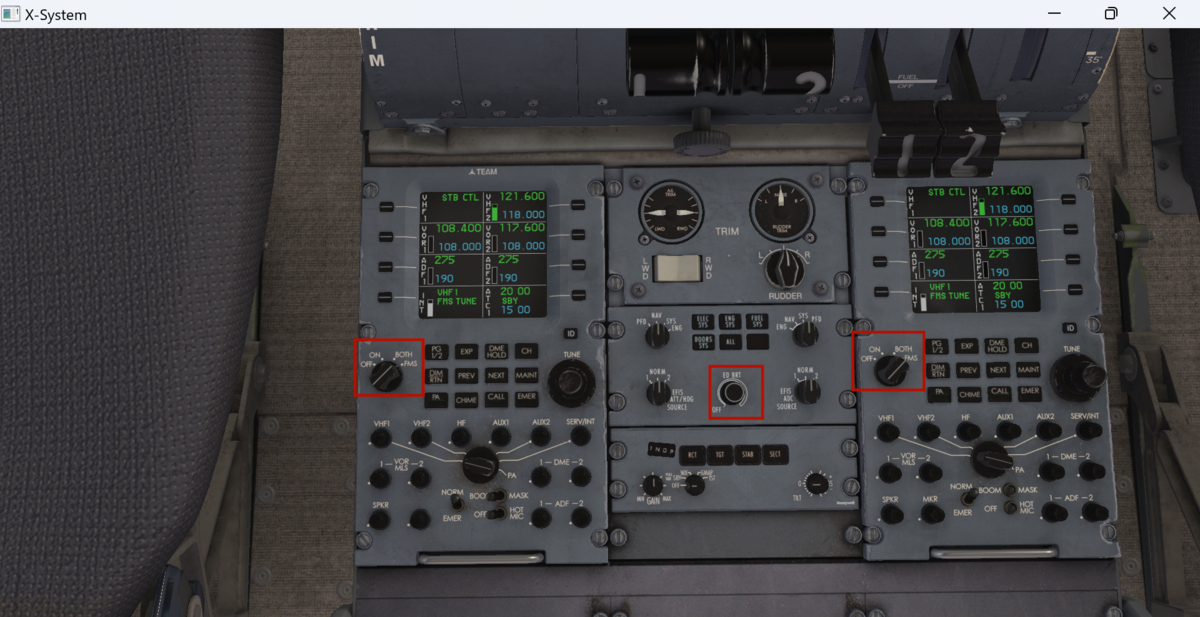
前項の続きです。無線、EDの電源を入れます。無線はAudio and Radio Management system (ARMS)という統合システムにまとめられています。
ARMSのノブをFMSに設定しておきます。
ARMSのノブにはOFF, ON, BOTH, FMSの4つのポジションがあります。
ON: 左右のARMSは独立して動作する。
BOTH: 左右のARMSは同じ内容を示す。
FMS: 無線設定がFMSによって上書きされる。MCPのAPPRボタンを押すとVOR/ILSの設定がFMSで選択済みの設定に上書きされる。(VOR/ILSアプリーチの場合に限る)

CDUの入力を開始します。ACCEPTを押します。ボーイングやエアバスのCDUに慣れている人は注意が必要です。Q400のCDUにスクラッチパッドはなく、設定したい項目のボタンを押し編集可能にしてから直接入力するスタイルです。なので、単にキーボードを押しても下に入力文字は出ません。

フライトプランの設定をします。FPLを押してL1を押します。RJTTがなかったらそこから入力してください。次にMENUを押します。
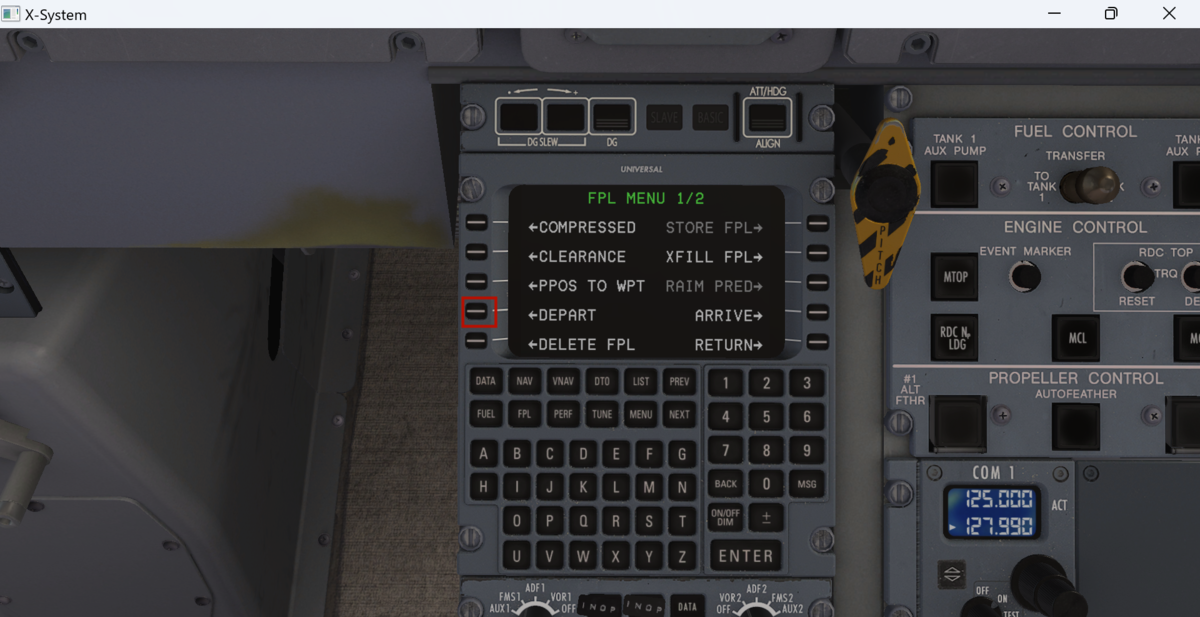
DEPARTからSIDを選択します。

滑走路、SIDの候補が番号で示されるのでその番号を上記の押して、ENTERします。

SIDの終端であるBEKLAの下9番目を押して編集可能にします。

R2で航空路Y884(2番)を選択します。ここも番号で指定します。

続きです。

Y884をYARIIまで進むので3番を選択します。

最後に目的地であるRJNKを入力します。

SIDの選択と同じように、STARを入力します。
STAR: YARIIE
APPR: RNV 24 (TRANS: KINKA)
このあたりはchartを見て適切に選択します。
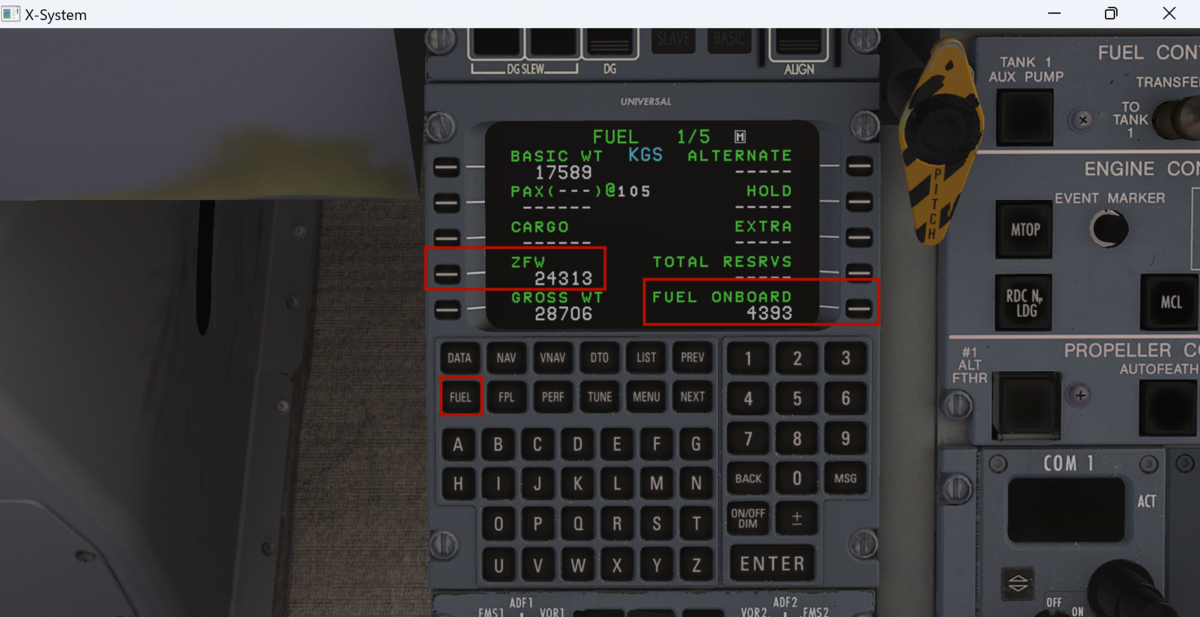
FUELを押してZFW、FOBを入力します。
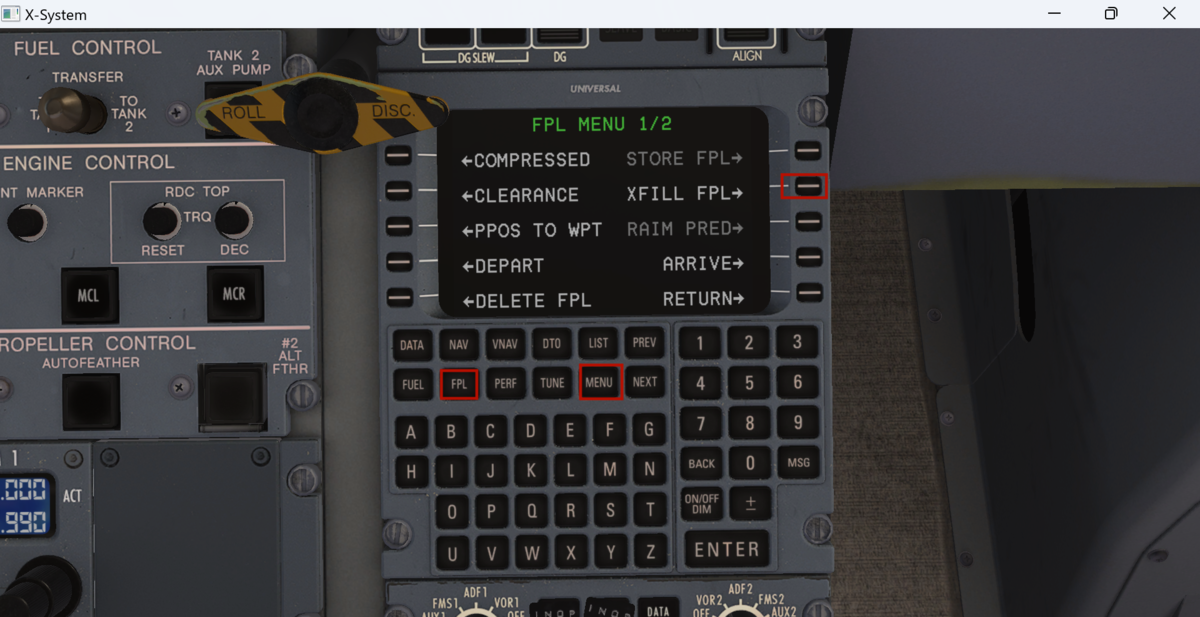
このアドオンでは機長側、副操縦士側のCDUは独立して動きます。そのため副操縦士側に機長側で設定したデータをコピーします。FPL -> MENU -> XFILL FPLでコピーできます。
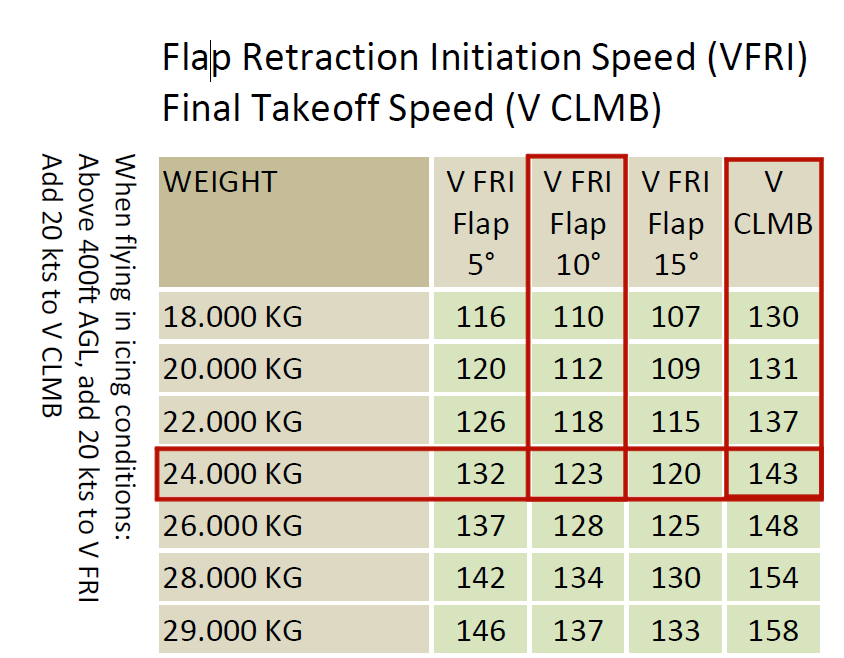
V-speedを計算していきます。Q4XPにはチャートが付属していなかったので、Majesticのデータを拝借します。Vfri/Vclimb=123/143とも止まります。アンチアイスを使用する場合は+20knotします。フラップは10°で離陸します。

Vr/V2=109/113となります。こちらもアンチアイス使用の場合は+20knotしてください。V1はVrと同じとします。V1, Vr, v2をPFDに設定してください。

エンジン始動手順を開始します。アンチコリジョンライトをREDにします。エンジン始動は一番ワクワクするポイントです。

機長側ナビゲーションソースをNAV SOURCEノブをいじってFMS1に設定します。
ところで機長席がなぜ右側なのか疑問に思ったことはないでしょうか。ネットで調べると船が左に接岸する名残だというのが見つかりました。なぜ左側に接岸するのかはよくわかりませんでしが、子供向けの「航空機のひみつ」という書籍で答えが見つかりました。これによると初期の船は右側に舵がついているために、左側に接岸するようでした。ベネチアの船をイメージしてみてください。観光客が前に乗り、一番うしろにオールを持って操舵するおじさんがいます。「ベネチア 船」で画像検索するとわかりますが必ずおじさんは船の右側にオールを突き出して操舵しています。すると左側に接岸するのは納得です。
右側機長席は世界共通なので変わることはないと思いますが、どこかの法令に明文化されているのか?という点は気になりますね。
余談が長くなりましたが、エンジン始動の続きです。
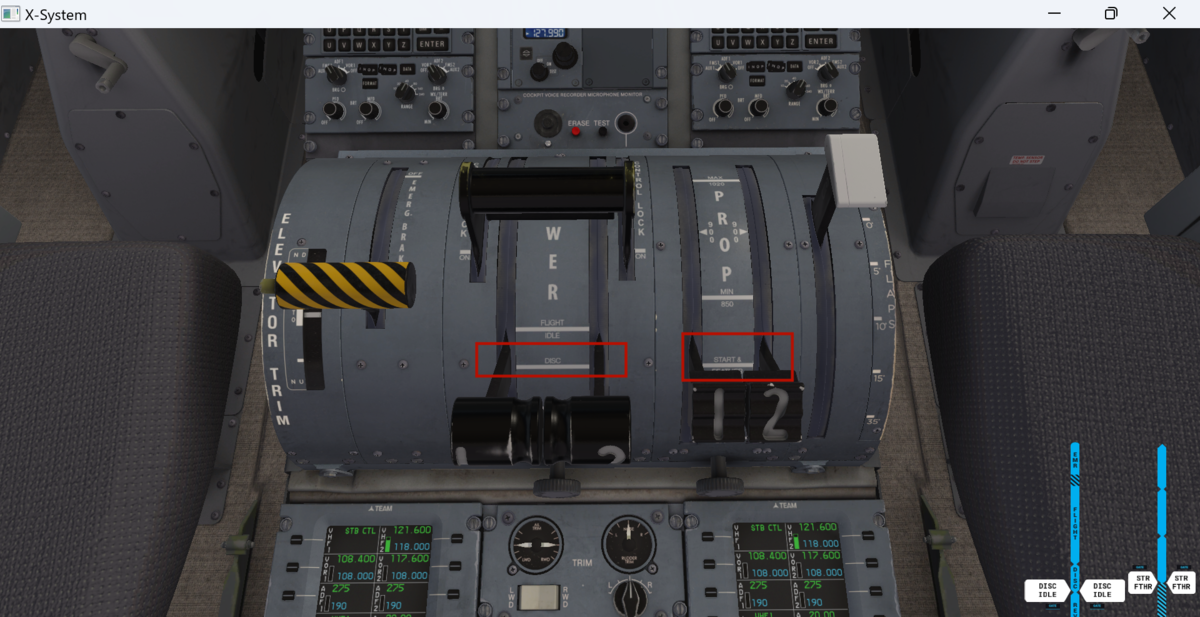
パワーレバーをDISC IDLE(地上アイドル)、コンディションレバーをSTR FTHR(スタート、フェザー)に設定します。
プロペラ機には固定ピッチプロペラと可変ピッチプロペラの2種類があります。固定ピッチプロペラはプロペラのピッチが固定されておりRPM(回転数)を上げるとより推力が得られます。固定ピッチプロペラで速度を出そうとすると回転数を上げる必要がありますが、回転数には上限があります。一方可変ピッチプロペラはピッチが調節でき、固定ピッチプロペラより回転数が小さくてもピッチを調節して同等の推力を得ることができます。Q400は可変ピッチプロペラで、コンディションレバーでプロペラ回転数を制御します。コンディションレバーでプロペラピッチを直接制御するのではなく、指定した回転数になるようにガバナーがピッチを調節します。例: 1000RPMが指定された場合、現在のRPMが1100の場合は、ガバナーがプロペラピッチ角度を上げて抵抗を増やし、回転数を落とします。

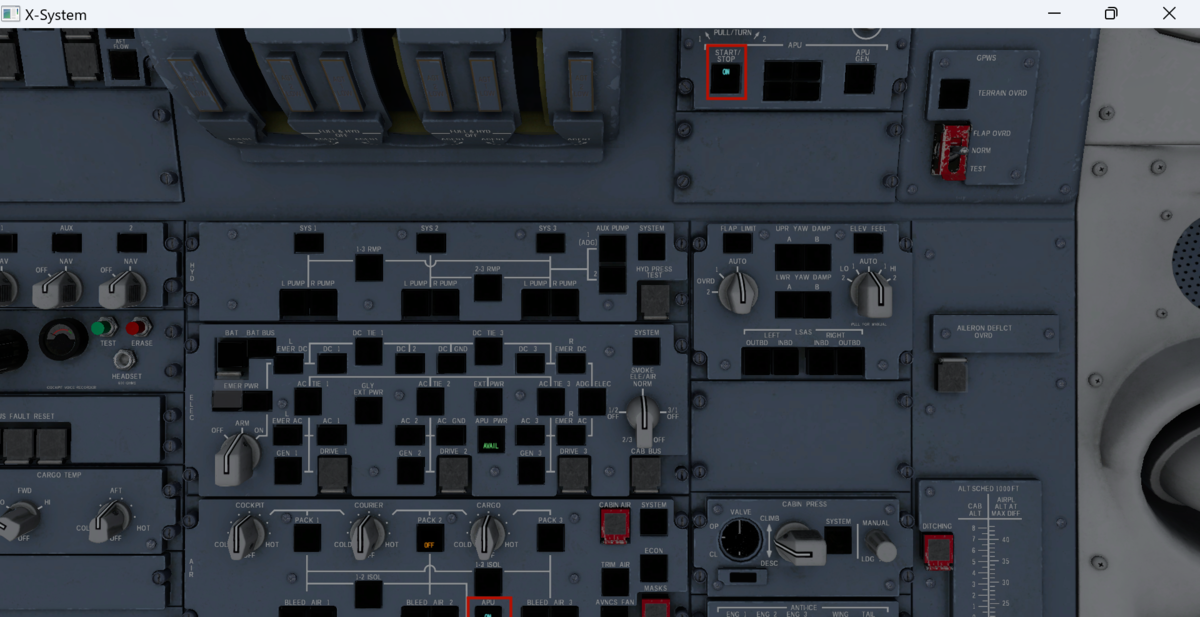
#2エンジンをSELECTしてSTARTボタンを押します。するとモーターがエンジンの高圧軸を回転させ、燃料を噴射&点火します。同じ手順を#1エンジンにも適用します。
本当は高圧軸回転数が一定値になったらコンディションレバーをSTR FTHRにして燃料を送り込むのですが、筆者の環境では#1, #2のコンディションレバーを個別に動かせなかったため、最初にSTR FTHRの位置に設定してしまっています。
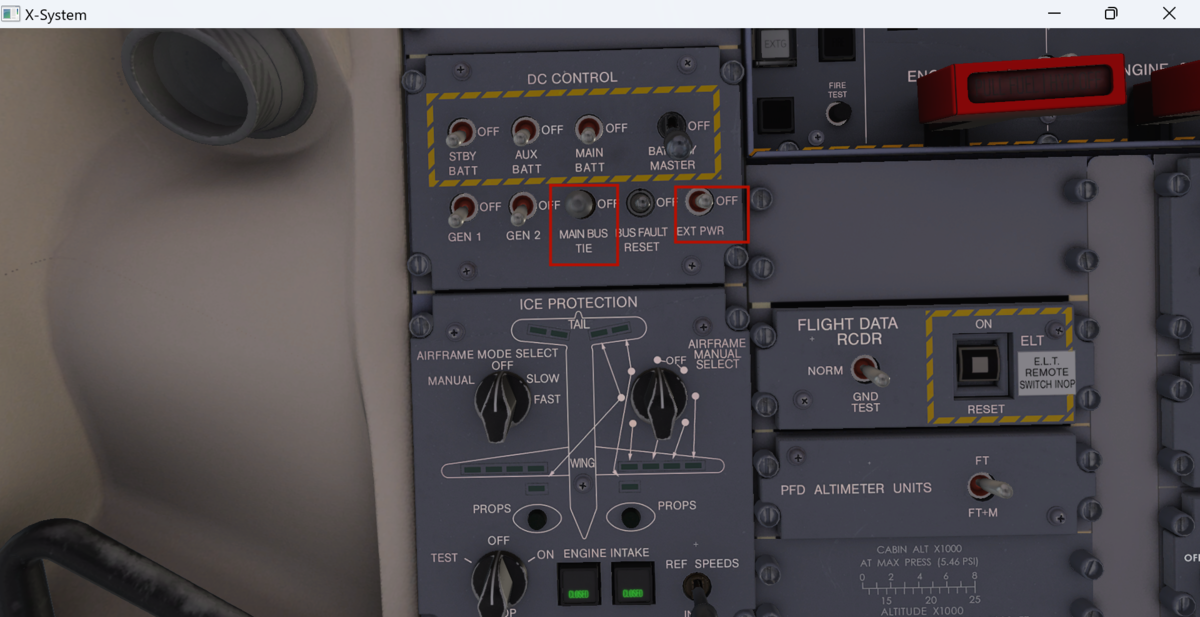
エンジンの発電機が動いているので外部電源が不要になりました。APUをつけている場合はここでOFFにしてください。
MAIN BUS TIEとEXT PWRをOFFにします。

コンディションレバーをMAX(1020)にします。

ここからは予備の油圧、燃料系統をONにします。これらの設定は離着陸時にだけONにします。
STBY HYD PRESS(予備油圧系統), PTU CNTRLをONにします。

予備燃料ポンプAUX PUMP#1, #2をONにします。AUTO FEATHERをONにします。AUTO FEATHERは離着陸時にエンジンに問題が発生した場合、自動的にプロペラをFEATHER状態にしてくれます。ここまでの設定は離陸後はOFFに戻します。

ステアリングスイッチをONにします。Q400の場合、この設定をしないとステアリングが操作できないので重要です。

スポイラーモードをTAXIにします。
Q400ではスポイラーは自由に使うことはできず自動的に使用され、スポイラーモードで制御します。スポイラーモードにはFLIGHTとTAXIの2ポジションがあります。
FLIGHT: スポイラーはロールシステムの一部としてエルロンと協調して動作し、原則用途には使用できません。
TAXI: スポイラーはロールシステムから切り離されます。
地上にいる場合はTAXI、離陸前にFLIGHTにせっていします。
着陸の瞬間に自動でスポイラーは全展開されFLIGHT->TAXIに自動遷移します。

ヨーダンパーをONにします。
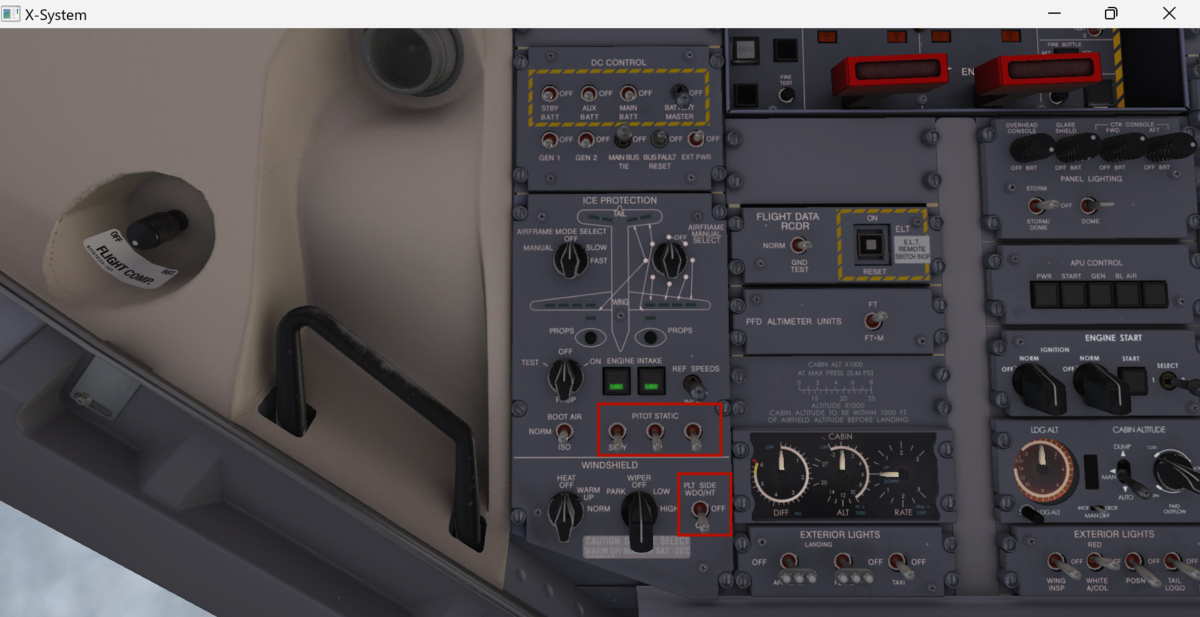
アンチアイス用の設定です。PITOT STATICの3つをONにします。PLT SIDE WOD/HTもONにしています。

地上走行を開始する前にTAXIライトをONにします。

パーキングブレーキをリリースします。滑走路に向かいます。

滑走路に到着しました。アンチコリジョンライトをWHITEにします。ランディングライトをONにして、TAXIライトをOFFにします。

トランスポンダーをTA/RAにします。R4 -> EXP -> L3の順に押していきます。

スポイラーをFLIGHTモードにします。フラップを10°に設定します。

すべての準備が整ったコックピットです。

パワーレバーのGOボタンを押します。

パワーレバーをFLIGHT RATINGまで進めると離陸推力がセットされます。

離陸しました。ギアアップします。

オートパイロットを設定します。
APボタンでオートパイロットの有効化をします。
NAVボタンでLNAVを起動します。
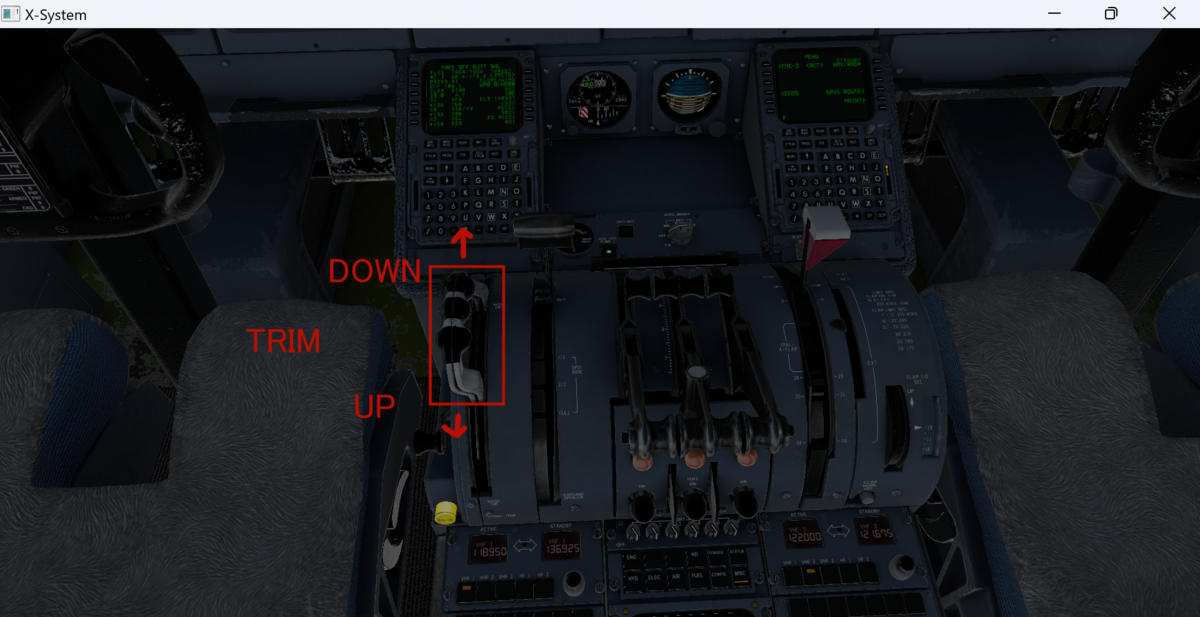
ALTボタンを2回押し一度GAモードを解除し、IASモードを起動して185knotをNOSE UP/DOWNノブで指定します。ALTノブでFL220を指定しALT SELボタンを押します。
ボーイングやエアバスに慣れている方はMCPの垂直モードの設定に注意が必要です。
IASモード: 指定速度を維持する。NOSE UP/DOWNノブで速度を指定する。オートスロットルはないため加減速するために高度が変化する。(速度が低い場合、下降して加速する)
VSモード:指定垂直速度を維持する。NOSE UP/DOWNノブで垂直速度を指定する。オートスロットルはないため速度は一定にはならない、手動で調整する必要がある。
VNAVモード: 下降専用のモード。FMSで指定したとおりに降下する。
ALTモード: 現在高度を維持する。
ALT SELモード: IAS, VS, VNAVモードと組み合わせて使用する。この3つモードはALTノブで高度を入力してもそれを無視する。従ってその高度に到達したら上昇/下降をやめたい場合は、ALT SELを同時に有効化させる必要がある。指定高度に到達するとALTモードに移行する。

左側にLNAV、右側にIAS 185, ALT SELが表示されていればOKです。速度が185knotになっていることも確認してください。
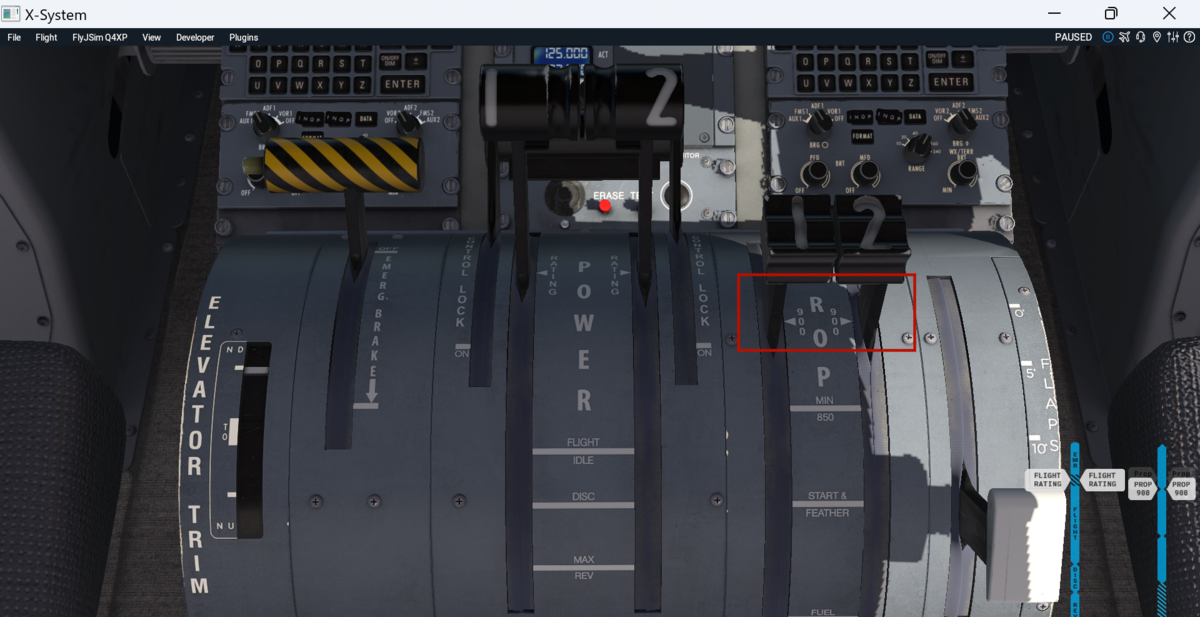
コンディションレバーを900に設定します。

MCLボタンを押し最大上昇推力をセットします。ここでENGINE CONTROLパネルについて説明します。
- MTOP: Maximum Take off Power(最大離陸推力)をセットします。コンディションレバーをMAX 1020に設定後、MTOPボタンを押し、パワーレバーをRatingポジションに設定します。
- RDC TOP: Reduced Take off Powerをセットします。コンディションレバーをMAX 1020に設定後、DECボタンを押すたびに離陸推力が2%減少するので意図する推力を設定してください。RESETボタンを押すとリセットされます。その後、パワーレバーをRatingポジションに設定します。
- MCL: Maximum Climb Rating(最大上昇推力)をセットします。コンディションレバーを900に設定し、MCLボタンを押し、パワーレバーをRatingポジションに設定します。
- MCR: Maximum Cruise Rating (最大巡航推力)をセットします。コンディションレバーをMIN/850に設定し、MCLボタンを押し、パワーレバーをRatingポジションに設定します。実はコンディションレバーがどの状態にあっても850RPMで上書きされてしまいますが、混乱するためコンディションレバーはMIN/850にしておくことをおすすめします。
- RDC Np LDG: (Reduced Np Landing)モードを起動します。着陸時は通常はコンディションレバーはMAX/1020にしますが、このモードを起動すると着陸時は850RPM(指定のRPM)でGA時には自動的に1020RPMをセットすることができます。このモードを有効にするには、コンディションレバーを目的のRPMモード(850)に設定してから、RDC Np LDGを押し、コンディションレバーを60秒以内にMAX/1020まで進めます。いずれかのパワーレバーが移動範囲の半分を下回っている場合、このモードに入ります。すべてが正しく設定されている場合、航空機が着陸するまで、またはパワーレバーがゴーアラウンドのために前進するまで、より低いプロペラ速度を維持します。パワーレバーがRatingポジションに入った場合、即座にプロペラに1020RPMになります。

STBY HYD PUMP, PUT CTRL, FUEL AUX PUMP#1, #2, AUTO FETHERをすべてOFFにします。これらは着陸前にすべてONにします。
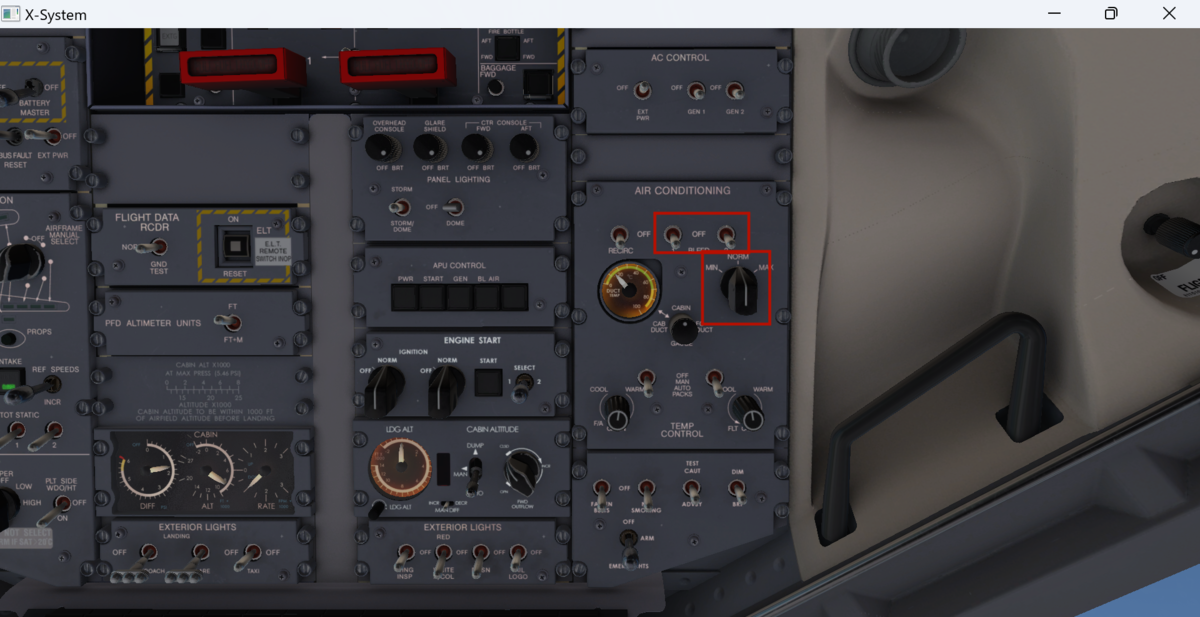
空調の設定をします。各エンジンのBLEED AIR(抽気)をON、ノブをNROMにして外気を機内に取り込み与圧します。これをしないと客室高度が上がり酸欠で気絶してします。
10000ftに到達したらランディングライトを消灯します。14000ftに到達したら高度計をSTD(29.92)にします。

指定高度に到達してレベルオフしています。ALTモードに入ります。

コンディションレバーをMIN/850に設定します。
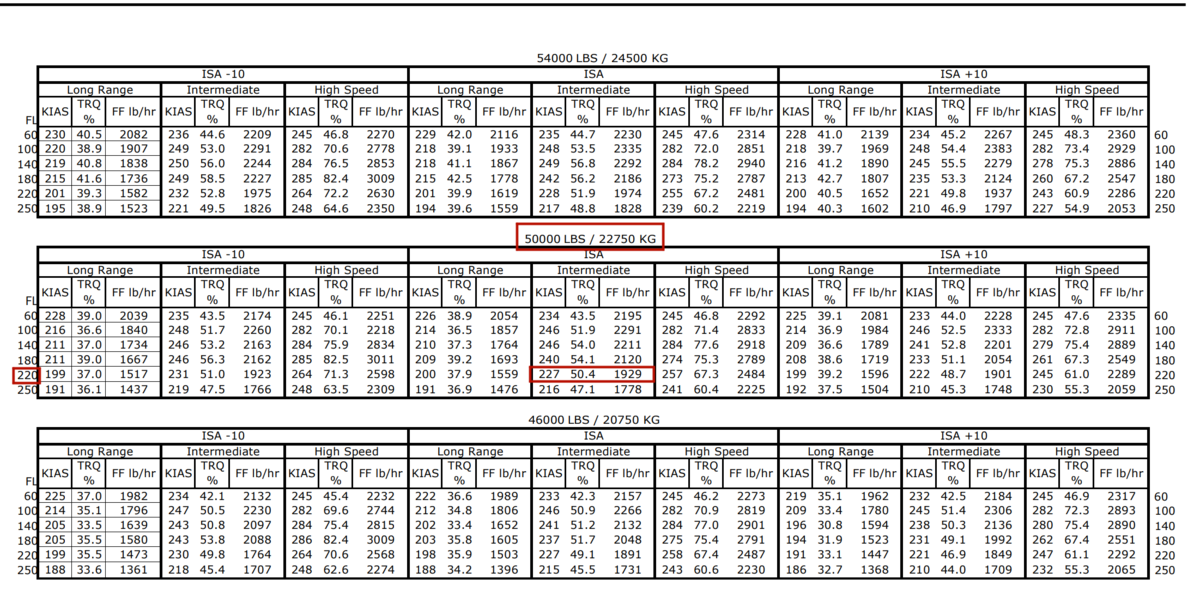
Majestic Q400のテーブルを参照します。FL220, 22750KGのエントリを参照すると227knot, 50.4Torque, 1929FFとあります。

MCRモードを起動します。最大巡航推力がセットされます。227knotになるまで最大推力のままにして、到達後はMCRをキャンセルしてTorqueを50.4になるようにパワーレバーを手動で調整します。

巡航中です。




降下の準備をします。CDUのVNAVページを開きTGT V/S(目標降下率)に1800と入力し、各ウェイポイントの通過予定高度を入力します。通過予定高度はSTARのチャートYARIIEを参考にします。

ウェイポイント高度の入力続きです。

機能の紹介です。DTOページはDirect To機能が利用でき、指定のウェイポイントに直行できます。今回は使用しません。

MBEを通過後、TODを迎えます。

TODに到達しました。ALTノブで降下高度11000ftを入力後、VNAVボタン、ALT SELボタンを押します。繰り返しですがALT SELを同時に押しておかないとALTノブで指定した高度は無視されます。

11000ft到達後も同じようにALTノブで高度を設定、VNAV、ALT SELボタンを押すを繰り返します。
14000ftを切ったらQNHを設定します。10000ftを切ったらランディングライトを点灯させます。
予備系統の油圧、燃料ポンプ、フェザーをONにします。
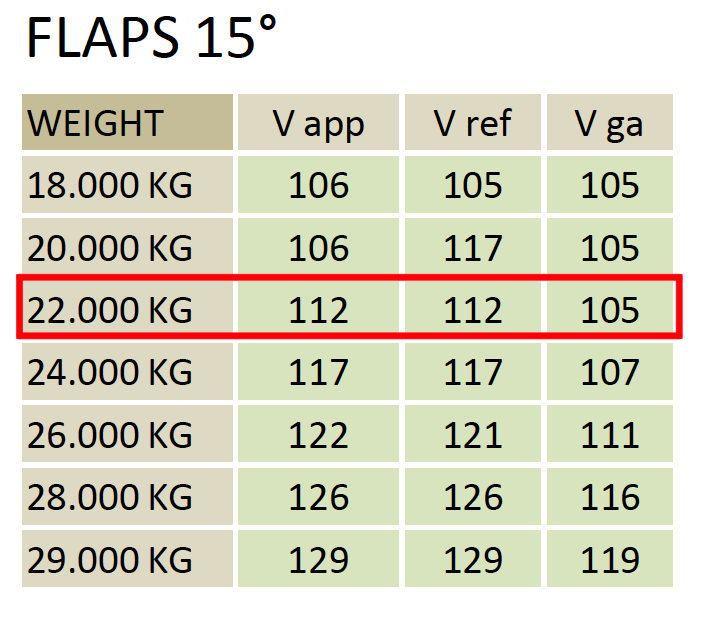
FLAP 15°の場合は112knotがアプローチ速度になります。アンチアイスを使用している場合は+20knotして使用してください。
コンディションレバーをMAX/1020に入れます。RDC Np LDNは実施しません。

いよいよアプローチです。今回はRNAVアプローチです。APPRボタンを押すとアプローチモードに入ります。PFDにAPPRと表示されるのを確認してください。RNAVは非精密誘導ですが、なかなかいい感じに水平・垂直方向を誘導してくれます。ILS・VORアプローチの場合はAPPRボタンが押されたタイミングでARMSの設置が上書きされます。

1000ftまでに最終フラップ、ギアダウンをしておきます。

タッチダウンしました!パワーレバーをリバースに入れて逆噴射&スポイラー展開します。
お疲れさまでした。
以上
X-Plane 11 Saab 340A Cold & Darkからエンジン始動~巡航まで

みなさんSaab 340というターボプロップ機をご存知でしょうか?
Saab 340は約30数名(型名によって異なる)乗りのターボプロップ機で、1983年に初飛行し現在でも運用されています。残念ながら日本の空からは2021年12月をもって完全退役して見ることはできません(北海道エアシステムが最後のオペレーター。日本エアコミューターは2019年12月に退役済)。Saab 340にはいくつかのタイプが有りSaab 340Aが初期型(今回はこれを操縦します)、 Saab 340Bがエンジン換装型でペイロード・航続距離の強化型、Saab 340B-WTはAPU装備型です。
筆者はターボプロップ機の中ではSaab 340が一番好きです。ターボプロップ機といえばQ400やATR42などの高翼機(翼が胴体より髙い)が浮かびますが、Saab340は低翼機でさながらリージョナルジェット格好良いフォルムをしています。
今回操縦するSaab 340Aは最も初期に生産された型です。APUは装備されておらずエンジン始動にGPUが必要だったり、基本的にはVOR航法オンリー(X-PlaneではGNS530が装備され使用可能です)なので中々古めかしいですが面白い航空機です。

今回のフライトプランです。羽田-小松間をFL240で巡航します。SimBriefではSaab 340Aはが無いのでSaab 340Bで作成しました。この場合ZFW多めに、巡航高度が高めに出たるするので、オーバーウェイトが発生したら手動でSimBriefへの入力値を変更します。

フライトプランです。羽田34Lを離陸後BEKLA2A、MBE、YARIIと飛んでいきます。
X-PlaneではGNS530を縦方向誘導(LNAV)に使用できるので、基本的にはGPS誘導で飛びます。途中のwaypointであるMBEはVORでもあるので、この区間だけVOR航法を試しにやってい見ます。(すべてGPS誘導だと味気ないので)

垂直方向のフライトプランです。BEKLA到達前にT/C、MBEのあとにT/Dです。
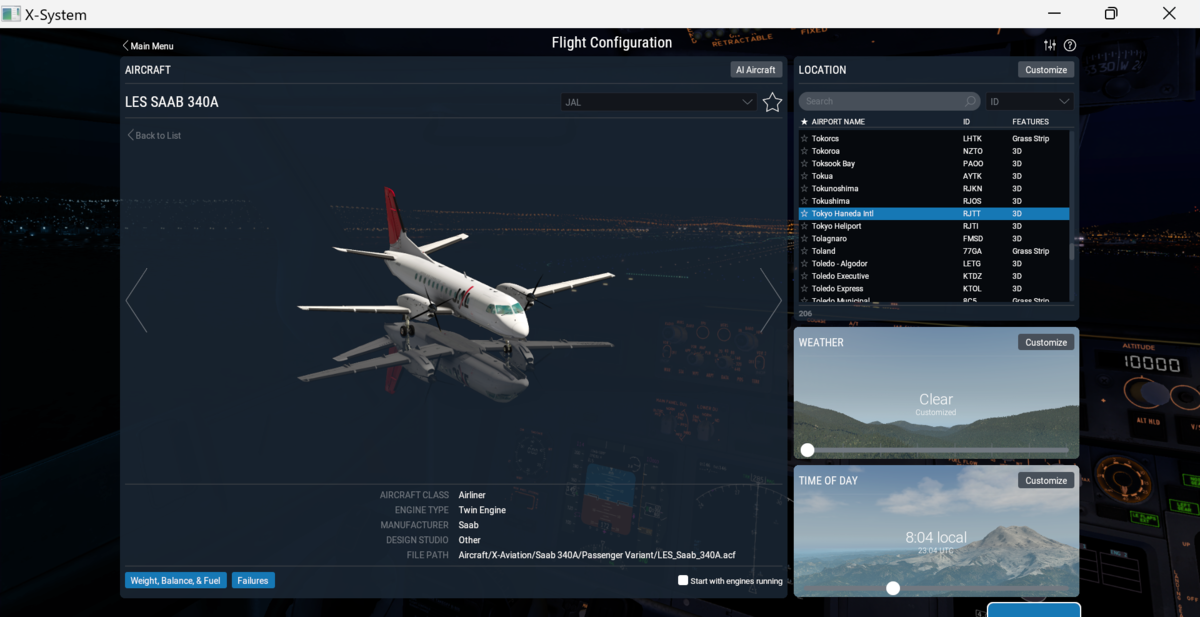
ロケーションはRJTT、機体はSaab 340Aを選択します。
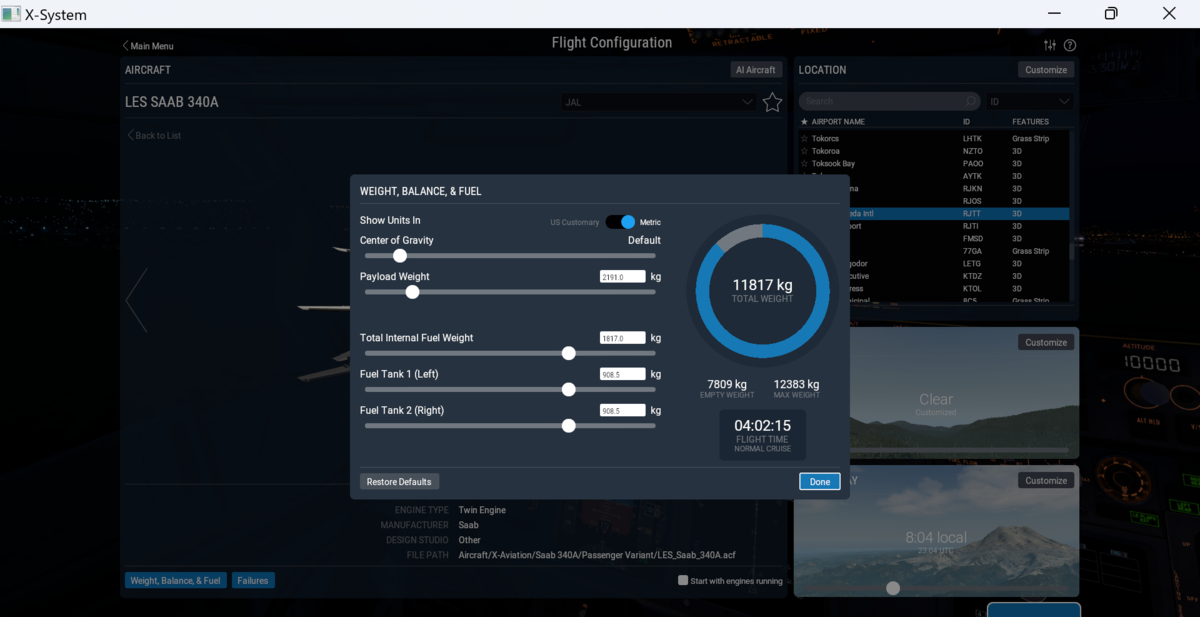
ペイロードと燃料の設定をします。このアドオンはEFBがついていないのでロード前に燃料等を設定する必要があります。Payload 2191 KG, Total Fuel 1817KGとします。

ロード直後の画面です。Cold & Darkで何もついていません。

外観です。安全用の赤いテープやコーンがあります。

メニューからRemove Allをすると全て取り外せます。GPUを有効化します。

下段、EXT PWRをONにして外部電源を有効化します。
中段、左右バッテリーをONにします。
上段、DC ELECを3つともONにしてアビオニクスの電源を入れます。

空調系の設定です。BLD VALVEをRESET -> AUTOに設定します。

客室サインであるシートベルト、禁煙サインをONにします。

メニューのUser PreferencesからUse PL Auto-LatchをONにします。この設定でスロットルレバーの操作だけでリーバス側まで操作できます。OFFの場合スロットルレバーを一旦フライトアイドル以降に進めると、リバース側に戻すことはできません。(他に設定がいるはずです。)

NAVライト、BCNライトをONにします。

AUTO COARSENをONにします。これは離陸時などにエンジンfailureした際にプロペラを素早くfeather状態にして抵抗を減らすための装置だそうです。離陸時やGo-Around時にだけONにします。
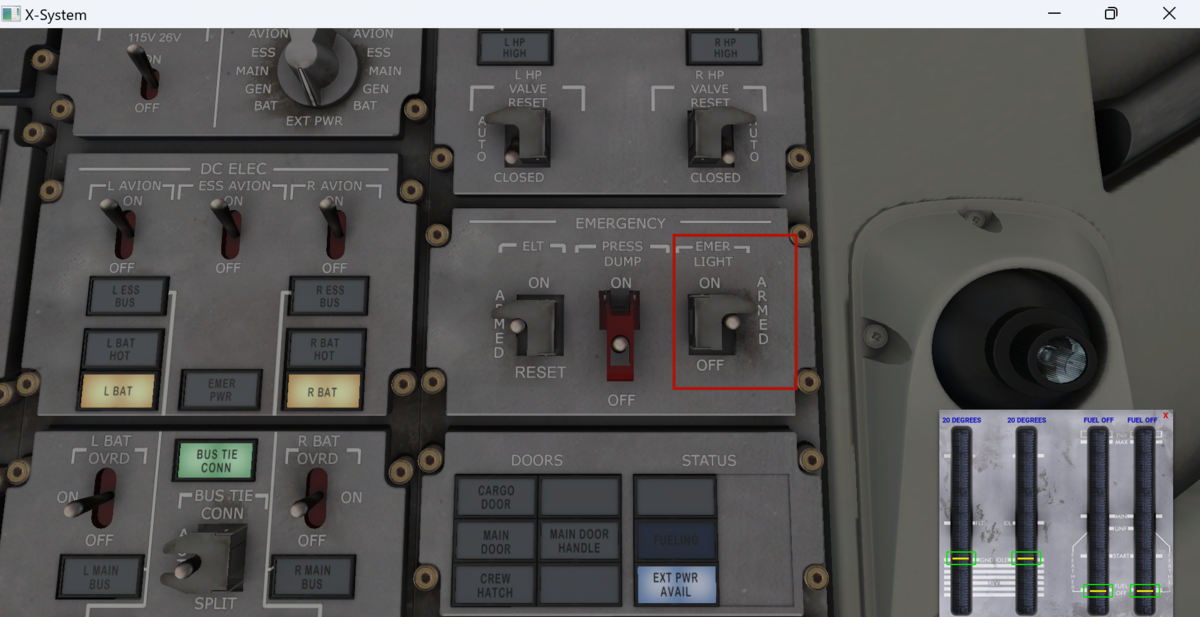
非常灯をARMにします。

エンジン始動手順です。
まずパワーレバー(スラストレバー)をGround Idle、コンディションレバーをStartの位置にします。Saab 340Aのエンジン始動は簡単でスタートスイッチを左右のどちらかに倒すだけです。(倒した方向のエンジンが始動します)

左エンジンから始動していきます。

左エンジンの計器を監視します。

両エンジンの発電機をONにして、外部電源をOFFにします。

タクシー準備です。コンディションレバーをMAXにします。これで最大の回転数を得られます。
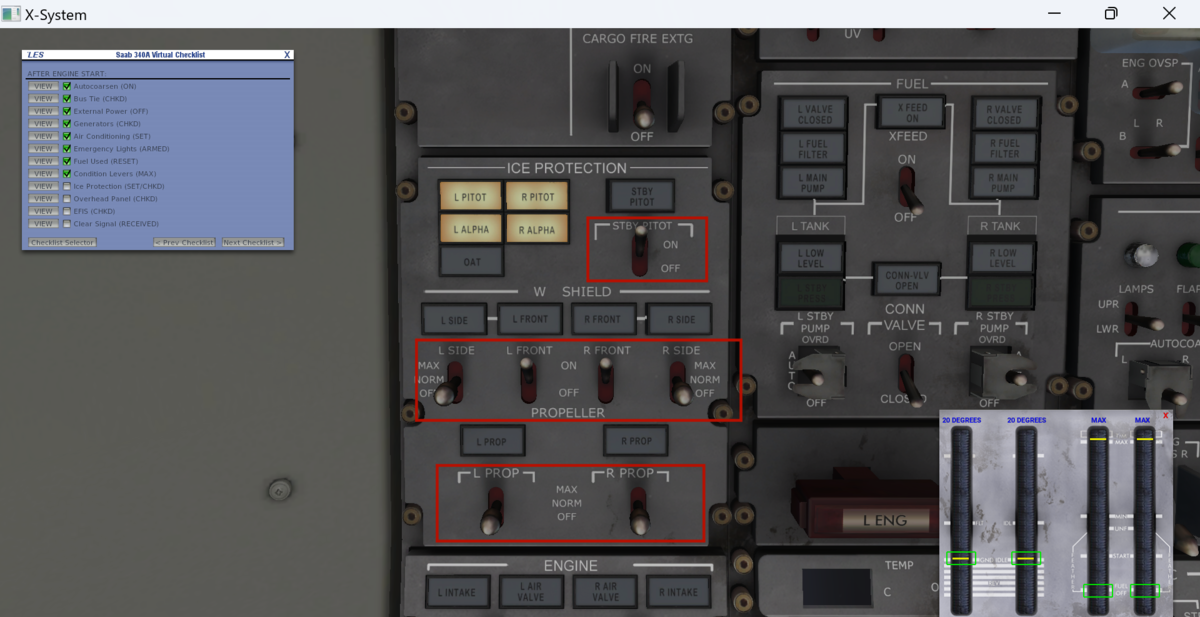
氷結防止装置をONにします。プロペラはOFFのままで良いです。

CTOTを両エンジンARMにします。CTOTはジェット機で言うReduced Thrust Takeoffのようなもので、タービン内温度ITT(Interstage Turbine Temperature)が一定値以下になるように出力を調整します。左についているノブで出力(トルク)を調整します。
離陸時にパワーレバーを65°まで倒すと、自動的にCTOTが離陸推力を設定します。65°以上パワーレバーを倒すとCTOTは無効化されてパワーレバーの通りの推力が得られます。
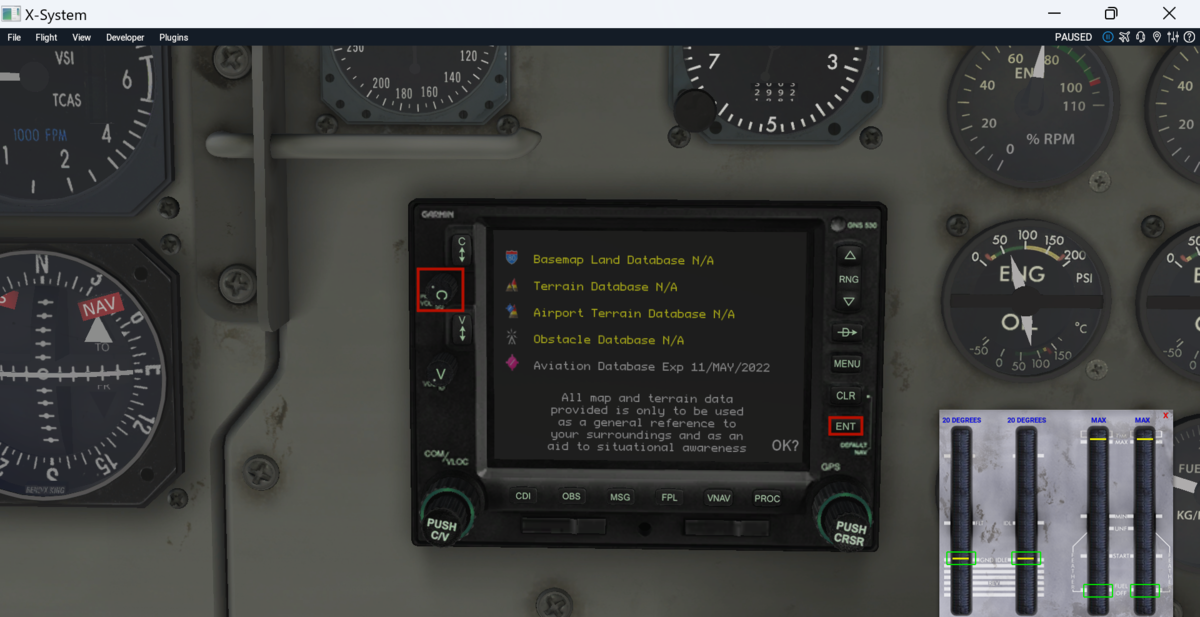
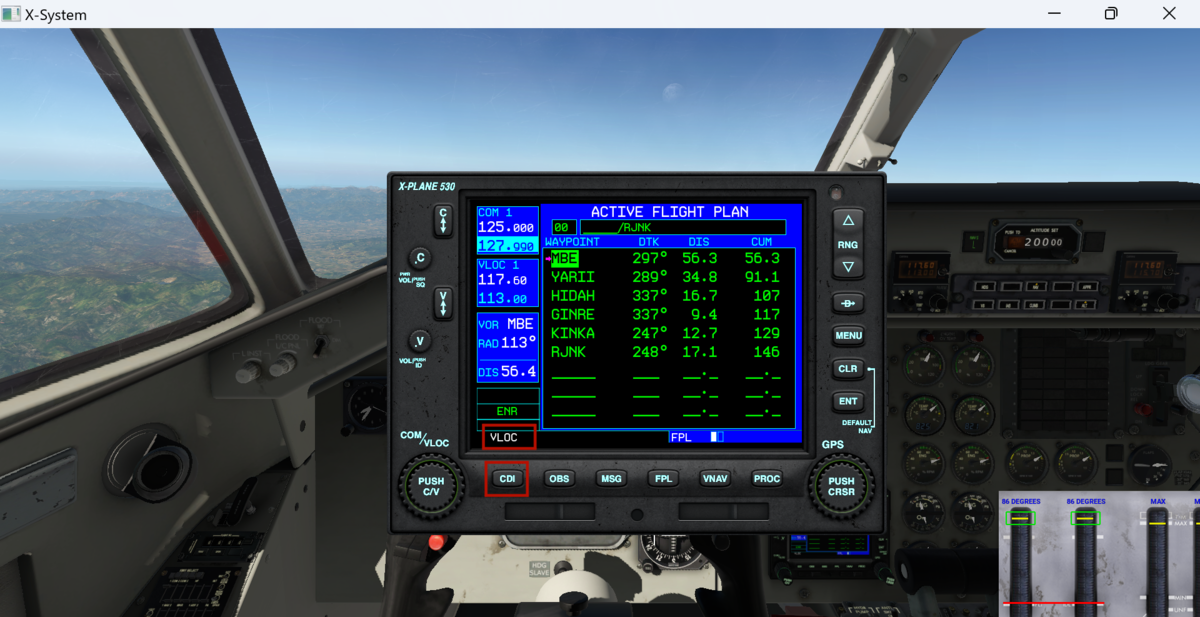
GNS 530の設定です。左側のノブで電源を入れ、OK?と確認されるので右側のENTを押します。

FPLのボタンを押してフライトプランを入力します。
RJTT/RJNK
SID: BEKLA2A (RW34L)
STAR: YARIIE
ENROUTE: MBE
TRANS: KINKA
APPR: RNAV24
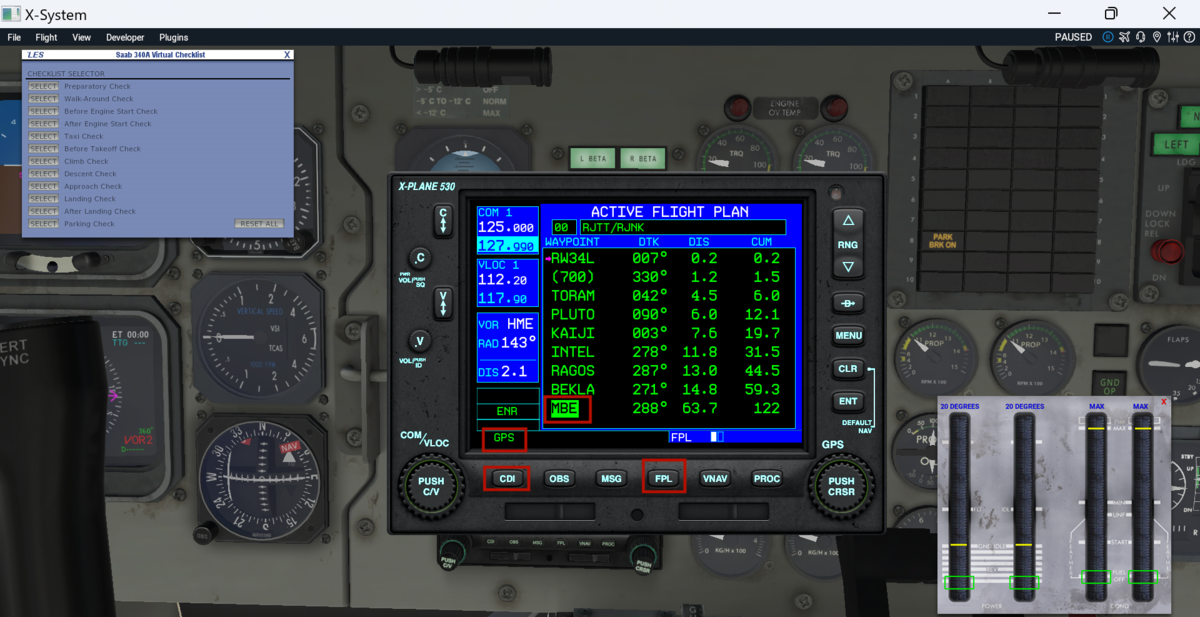
GNS 530はairwayは読み込めないので、全てwaypointで入力する必要があります。といってもSID/STARを除くとMBEしかwaypointが無いためここだけ手動入力します。
またCDIのボタンを押して、GPSモードになっているか確認してください。表示がVLOCの場合は、GPSではなくVOR誘導になります。

タクシーライトをONにしてタクシー開始です。

RW34Lの前です。

フラップを15°に設定します。

T/O INHをONにします。画像の他の計器は無視してください。

パワーレバーを65°にします。すると離陸推力が設定されるので、100Knot付近で操縦桿を引き離陸します。
離陸しました。ギアアップし、適切にフラップを格納していきます。

CTOTをOFFにします。

AUTO COARSENをOFFにします。

500 feet AGLでオートパイロットをONにします。オートパイロットスイッチは2秒ほど押しっぱなしにするとONになります。

NAV、CLIMBをONにします。横方向はNAVモードで制御、縦方向はCLIMBモードで制御しています。
CLIMBモードの上昇率が低い場合、IASモードにして速度バグを低い速度にすると、速度を抑えるため上昇できます。
ここでSaab 340Aの自動操縦モードについて簡単に説明します。本機にはオートスロットルはありません。
そのためIASモードを選択すると指定速度を維持するためにピッチが変化します。例えばオーバースピードの場合はピッチを上げ高度を上げることで速度を落とします。IASモードで上昇するためにはスピードバグを現在速度より下げてパワーレバーを上げると上昇します。逆に下降したい場合は、スピードバグを現在速度より上げてパワーレバーを引けば、バグで指定された速度を得るために下降し始めます。
V/Sモードは指定された垂直速度を得るためにピッチを調整します。このとき速度は監視されないので、上昇の場合などは意図せず速度が落ち失速する危険があるのでこのモノーどを使用する場合はいつも以上に速度を注視してください。
現代のジェット機のようにオートスロットルがあればIASモードとV/Sモードは同時に使用できて便利ですね。

今回はMBEだけVOR誘導にしたいのでVOR周波数117.6MHzをNAV1&2に設定します。(本当はどちらか1つで良いです。)。左側を使用するのでNAV S Lを有効化しておきます。

コースはこちらから設定します。

左下、右下にVORまでの距離とコースが確認できます。

今回は使いませんがオートパイロットのV/Sモードでは上記でピッチの変更が可能です。

PFDの右上にV/Sモードのスピードが表示されます。上昇率を維持するためIASが落ちるので常に注意が必要です。筆者がV/SモードをつかているといきなりA/Pが切れ機種下げになることが度々あったので、もしかしたら失速していたのかもしれません。IASモードを使ったほうが安全かもしれないです。
MBEへのVOR誘導を有効化するため、CDIボタンを押してVLOCモードにします。このようにするとVOR1に設定した局に向けて誘導されます。

VOR1/2は同じ情報がセットされているため、同じ情報になります。
なぜか飛行中にX-Planeがクラッシュしたので今回はここまでです。以下はギャラリーになります。





以上
【初心者向け】MSFS PMDG 737-700 Cold & Darkからエンジン始動まで

Microsoft Flight Simulator 2020向けに発売されたPMDG 737-700をcold & darkの状態からtake-offするまで解説していきたいと思います。737はポピュラーな機体なので既に様々な解説動画等が存在しますが、文字で解説する日本語記事は少ないので、今回は初心者の方でもわかりやすいように丁寧に説明していきたいと思います。(筆者も初心者です)
なお本記事で紹介する順序はチェックリストの順序とは異なるため、注意してください。
PMDG 737-700にはデフォルトでliveryマネージャを備えていて、様々なliveryをインストールすることができます。日系だとANAがデフォルトで入っています。
737は大きく分けると4つの世代に分けることができます。(737-XXXのXXXの部分で世代がわかります)
- オリジナル世代: 100, 200
- クラシック世代: 300, 400, 500
- NG世代: 700, 800, 900
- MAX世代: 7, 8, 9, 10
737-700はNG世代になります。NGとはNext Generationの略で、グラスコックピットのさらなる進化なと当時の最新技術が取り入れられていました。
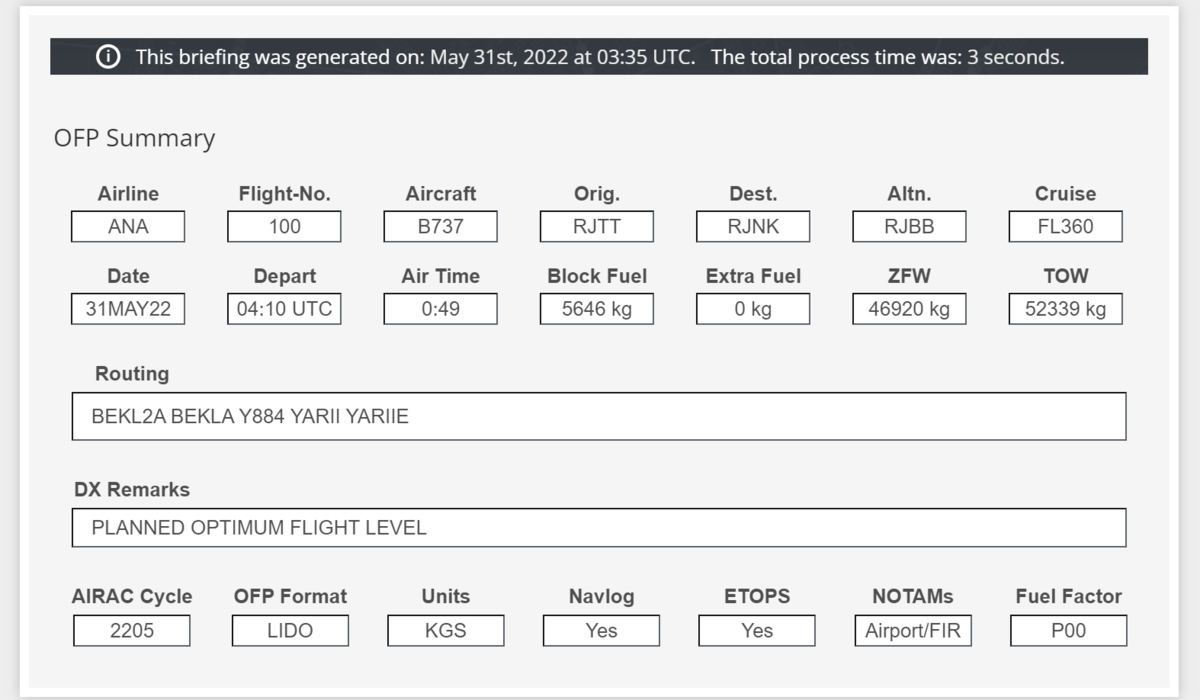
本日のフライトプランです。SimBriefで作成しました。

737のロード直後で計器は何も動いていません。

オーバーヘッドパネルから左上のバッテリーのガードを閉じると自動的にバッテリーがONになります。中央のガードを閉じると非常灯がARMになります。

この機体にはまだEFB(タブレット)がないので、CDUから機体の設定をすべて行います。PMDGは後のアップデートでEFBを追加予定とのことです。

「FS ACTIONS」→「AIRPLANE SERVICE」ボタンを押します。次に「GROUND POWER」をONにすると、GPUが接続され地上から電力が供給されます。これを設定しないと機体のバッテリーがあがってしまいます。

オーバーヘッドで下側のGRD PWR(Ground Power)を下に倒しGPUに接続します。次に上側のIRSを2つNAVにします。IRSは慣性基準装置といって機体にかかる加速度から速度を求め初期位置からの移動量を求めることができます。初期位置はCDUから現在の座標を入力します。

「FS ACTIONS」→「FUEL」を選択します。

5646KGを搭載燃料として入力します。液体燃料は温度や圧力によって体積が変化するので、単位はリットルではなくキログラムを使用します。

「FS ACTIONS」→「PAYLOAD」を選択します。乗客や貨物の量を設定します。
ZFWがSimBriefで計算された46.9になるように、乗客・貨物の量を調整します。ZWF(Zero Fuel Weight)とはその名の通り燃料がゼロの機体重量です。ZFWに燃料重量を足すと機体の全重量になります。
GW(全重量) = 燃料重量 + ZFW

MENUに戻り、FMCを選択します。
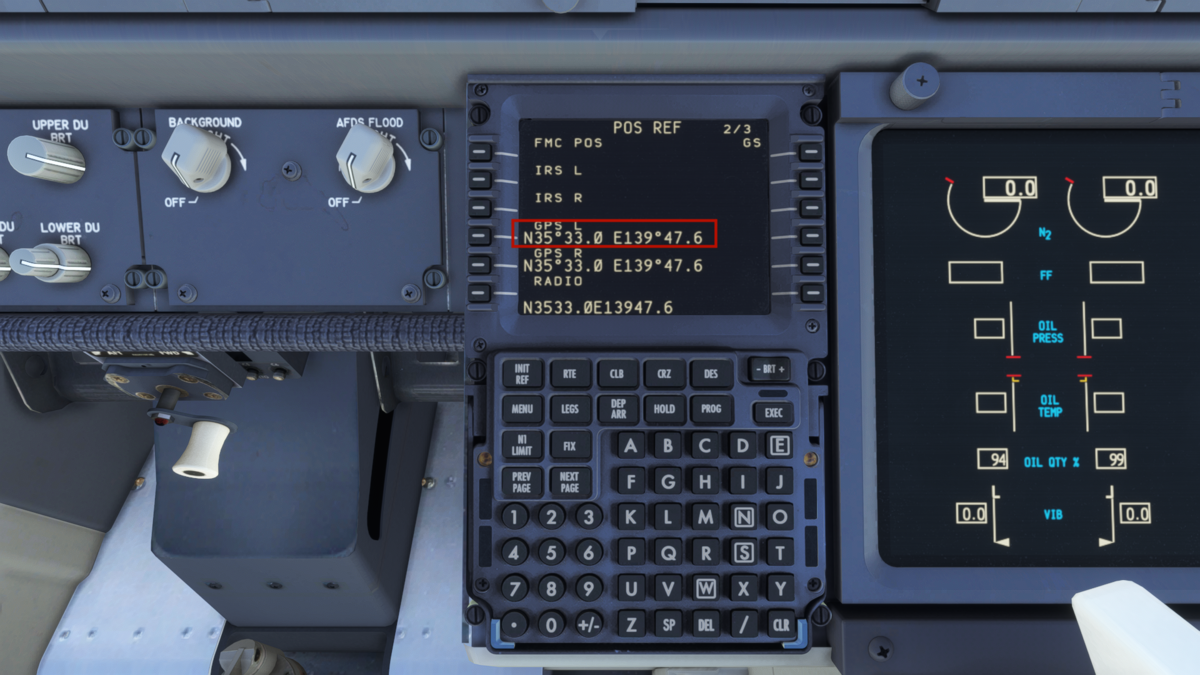
初期位置を与えるため、POS REFの次ページ(2/3)に行き、GPS座標をスクラッチパッドにCOPYして前ページに戻り□の箇所に設定します。これでIRSに初期座標を与えることができました。

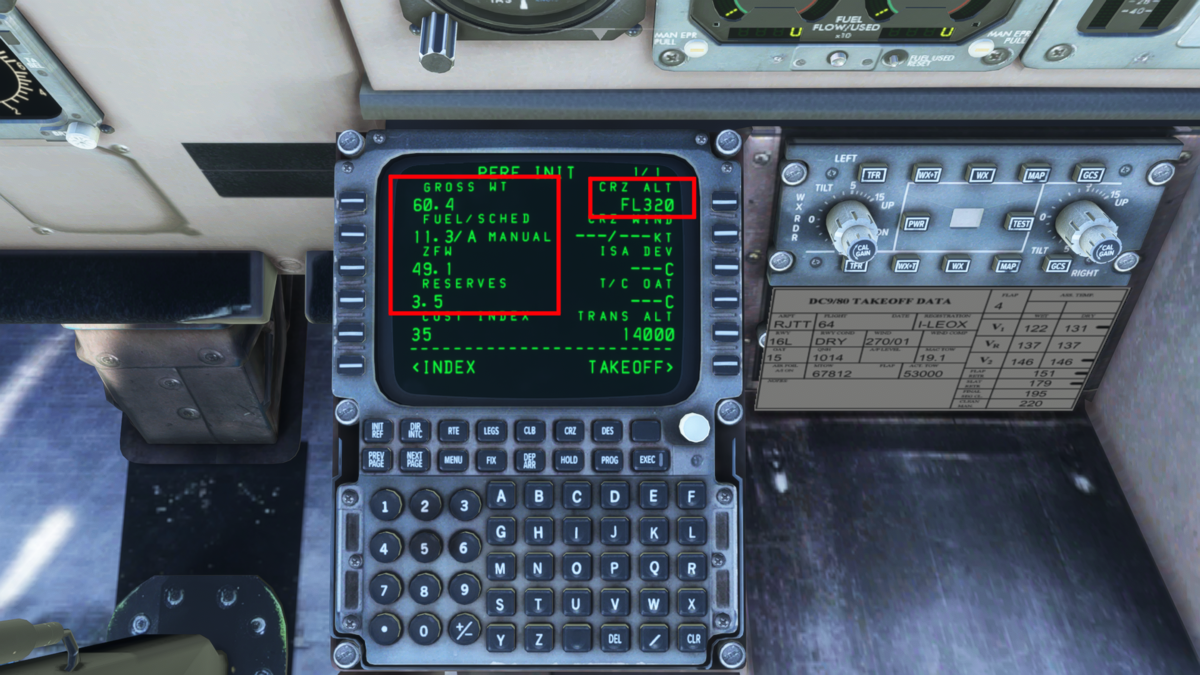
PERF INITページに行き赤部分を埋めます。
GW/CRZ CG、ZFWは先程のPAYLOADページを参照します。
RESERVESは1, COST INDEXは35(SimBriefより)とします。
巡航高度はFL360、日本のTRANS ALTは14000なのでそのように設定します。TRANS ALTは高度計の設定をQNH、QNEに設定する境目です。14000ft以下ではQNHをATC等から取得して設定する必要があります。14000ft以上ではQNE(29.92inHG)に一律で設定します。

巡航ルートを設定していきます。
RTEページで出発地RJTT, 目的地RJNKを設定します。

DEP/APRでRJTTのDEPを上記のとおりに選択します。出発経路をSID、到着経路をSTARと呼びます。
滑走路: 34R、SID: BEKLA 2Aです。

RTEページ戻りSIDからの経路をつなげます。BEKLAからはY884という航空路をYARIIまで飛行します。
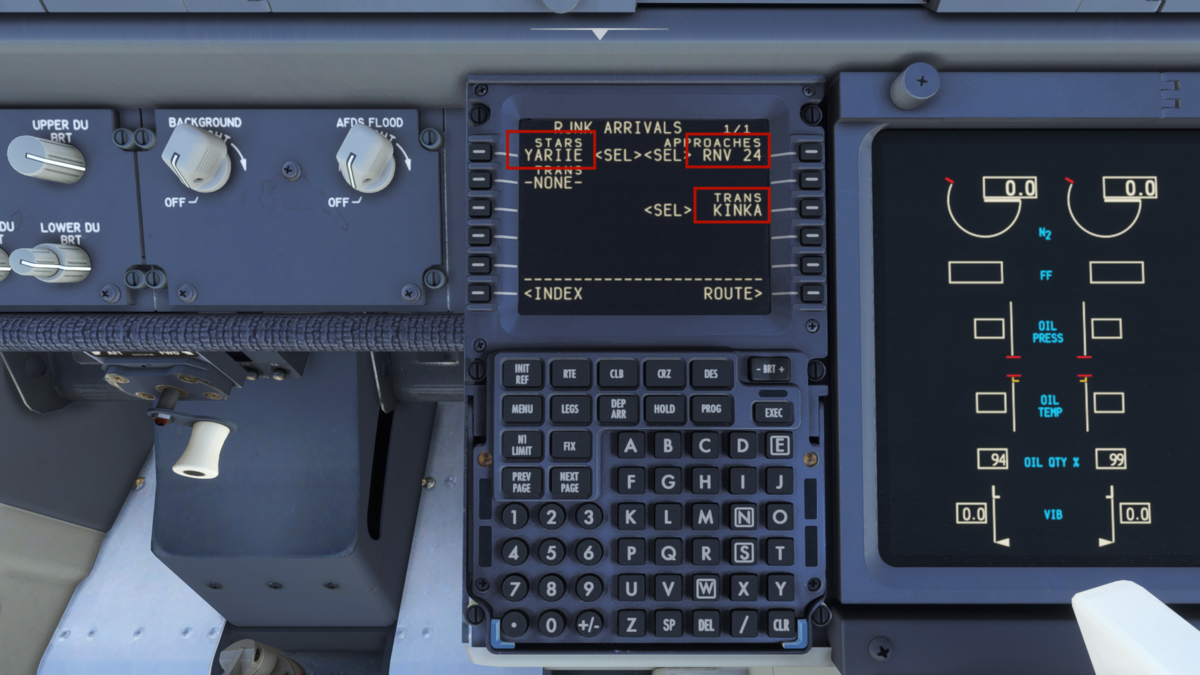
RJNKのSTARを上記のように設定します。
APP: RNAV 24
STAR: YARIIE
TRANS: KINKA
これでルートの設定は終了です。

次にTAKEOFF REFページに行き、離陸設定を行います。離陸時FLAPは10に設定します。するとV-speedが表示されるので左側のボタンを押し確認します。
実は右側のCG設定が漏れています。。。後のほど設定します。

RTEページに戻りルートをACTIVATEします。

EXECボタンを押します。

PERF INITページについてもEXECします。これでCDUへの入力は一通り終了です。お疲れさまでした。

左下:両翼燃料ポンプのスイッチをONにします。なお中央タンクは燃料ゼロなのでポンプはOFFでOKです。
上:ウインドヒート、プローブヒートをONにします。
その下:油圧系統をすべてONにします。
右側(上から):APU BLEEDをONにします。APUからの高圧空気がONになり、空調やエンジン始動に使えます。(まだAPUは動いていませんが)
その下:与圧の設定です。巡航高度である36000を設定します。
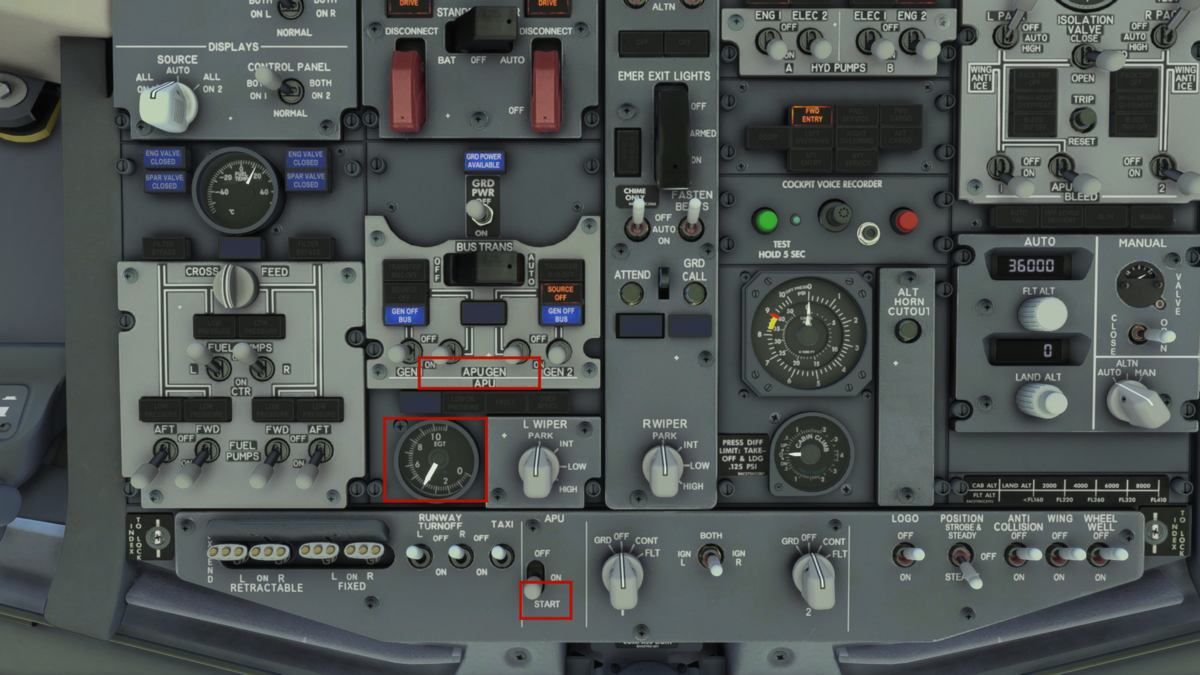
これからAPUを起動します。下側のSTARTにスイッチを倒します。すると上のメーターが動き出し、少し時間が立つとAPUの電力が利用可能になるので、APU GENを下に倒します。

APUが動いていることで抽気が得られ圧力が上昇しているのがわかります。

MCPもここで設定しておきます。

プッシュバックをするのでチョークを外します。GPUも自動的に外れます。これまでにAPUをONにしておいてください。


Toolbar Pushbakというツールでプッシュバックをします。X-PlaneのBetterPushbackと同じでマップでプッシュバック位置を選べます。

プッシュバックがスタートしたらエンジン始動に入ります。
第1エンジンの
スターターをGRDにします。(本当は第2エンジンからの始動だったかもしれないです)
APUの抽気が第1エンジンにあるスターター(風車のようなもの)に当たって、N2シャフトを回転させます。

N2の回転数が20%になったら第1エンジンの燃料バルプを上げて点火します。同じ手順を第2エンジンにもおこないます。

先程忘れていた設定です。CDUのTAKEOFFページにtakeoff CG 22.4を入力するとトリム値5.15が得られるのでトリムホイールに設定します。
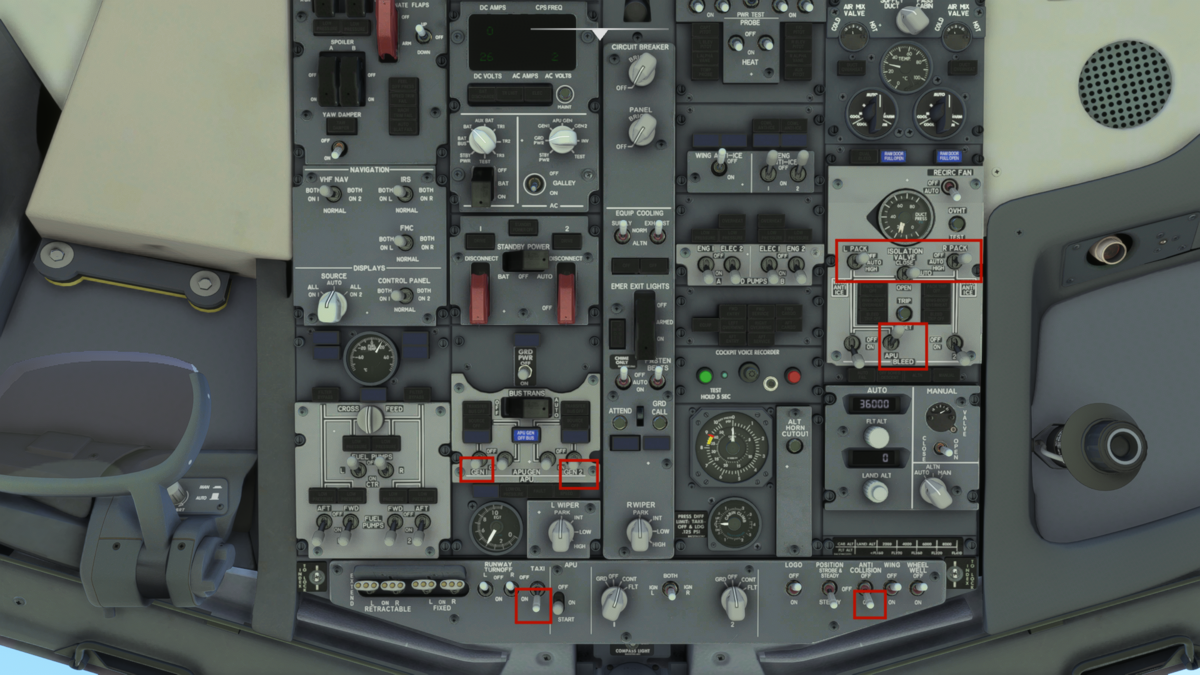
エンジンが発電する電力を使用するため左側のスイッチを下に倒します(第1/2エンジン)。
右上で両PACKをAUTO、APU BLEEDをOFFにします。
TAXIライトをONにします。
POSライトをONにします。(本当はプッシュバック前にやっておくべきでした)
また忘れていますがここでAPU自体をOFFにします。
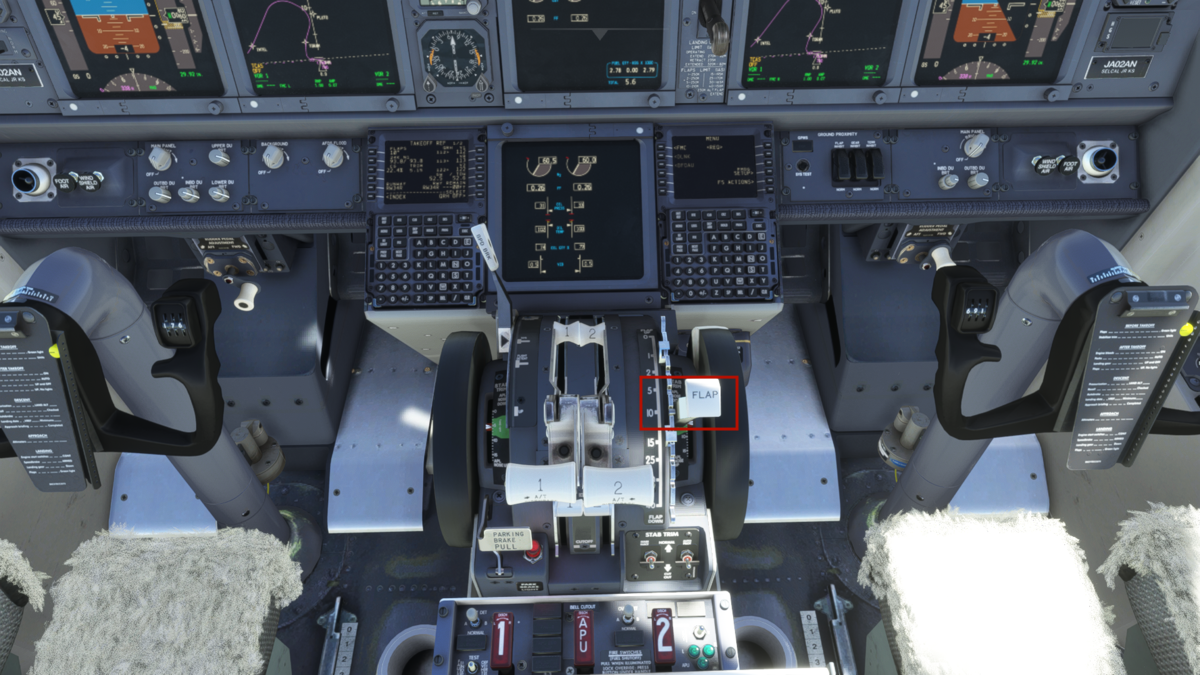
離陸フラップ10度を設定します。

オートブレーキをRTO(Rject Take Off)に設定します。

トランスポンダーをスタンバイにします。
これから滑走路へ向かいます。


滑走路に入る前にランディングライトをONにします。

トランスポンダーをTA/RAにします。

離陸前のMCPの設定です。A/T(オートスロットル)をON、FDを両方ONにします。

スロットルを少し前進させ、エンジンの回転数が揃ったらTO/GAボタンを押して離陸推力をセットします。スロットルは自動的に動きます。
離陸したらギアをあげます。

離陸後です。LNAV、VNAV、オートパイロットをONにします。
ちなみにPMDGではTO/GAボタンはこのネジの位置に隠しボタンとして用意されています。

ルート通りに飛行する様子です。ここまでくればあとは自動で飛んでくれます。

APUがつきっぱなしだったのでOFFにしておきます。(本来はエンジン始動後にはOFFにします。)
X-Plane11 MD-11 Cold & Darkからエンジン始動まで

今回はX-Plane11のRotate-MD11をCold & Darkから起動してみたいと思います。
MD-11とは

マクドネル・ダグラス社が開発した3発機で、同じく3発機であるDC-10の後継機です。旅客型と貨物型の2タイプありますが、今回は貨物型を飛ばします。エンジンが3つのジェット機は有名なもので、ボーイング727、ホーカー・シドレー HS121トライデント、ロッキードL-1011トライスター、そして今回紹介するMD-11(DC-10を含む)があります。これらは3エンジンという共通点がありますが、配置方法に違いがあります。
ボーイング727とホーカー・シドレー HS121トライデントは3エンジンが尾翼付近に集中配置されており、主翼には一切エンジンをぶら下げていません。一方でロッキードL-1011トライスター、MD-11は2つのエンジンを両主翼、1つのエンジンを尾翼に配置しています。更に細かいことを言うとMD-11だけ尾翼エンジンの配置方法が異なります。
尾翼エンジン: 串刺し方式 (MD-11など)

MD-11は垂直尾翼にエンジンを串刺しにしたような形です。このようにすることで、主翼のエンジンと同じように、気流をそのままエンジン取り込む事ができ、主翼エンジンとの部品共通化もできます。デメリットはエンジン分だけ垂直尾翼を小さくしないと垂直尾翼高が高くなることです。MD-11では垂直尾翼は小さくした代わりにラダーをダブルヒンジにして舵を取りやすくしたりしています。
尾翼エンジン: 機体埋め込み方式 (727, HS121トライデント, L-1011トライスターなど)

ボーイング727です。垂直尾翼エンジンはエアーインパクトレンチとエンジン排気口が一直線でつながっていないことがわかります。串刺し方式ではエンジン後部はラダーには使えませんが、埋め込み方式ではエアーインテークの後部はラダーとして使用する事ができます。
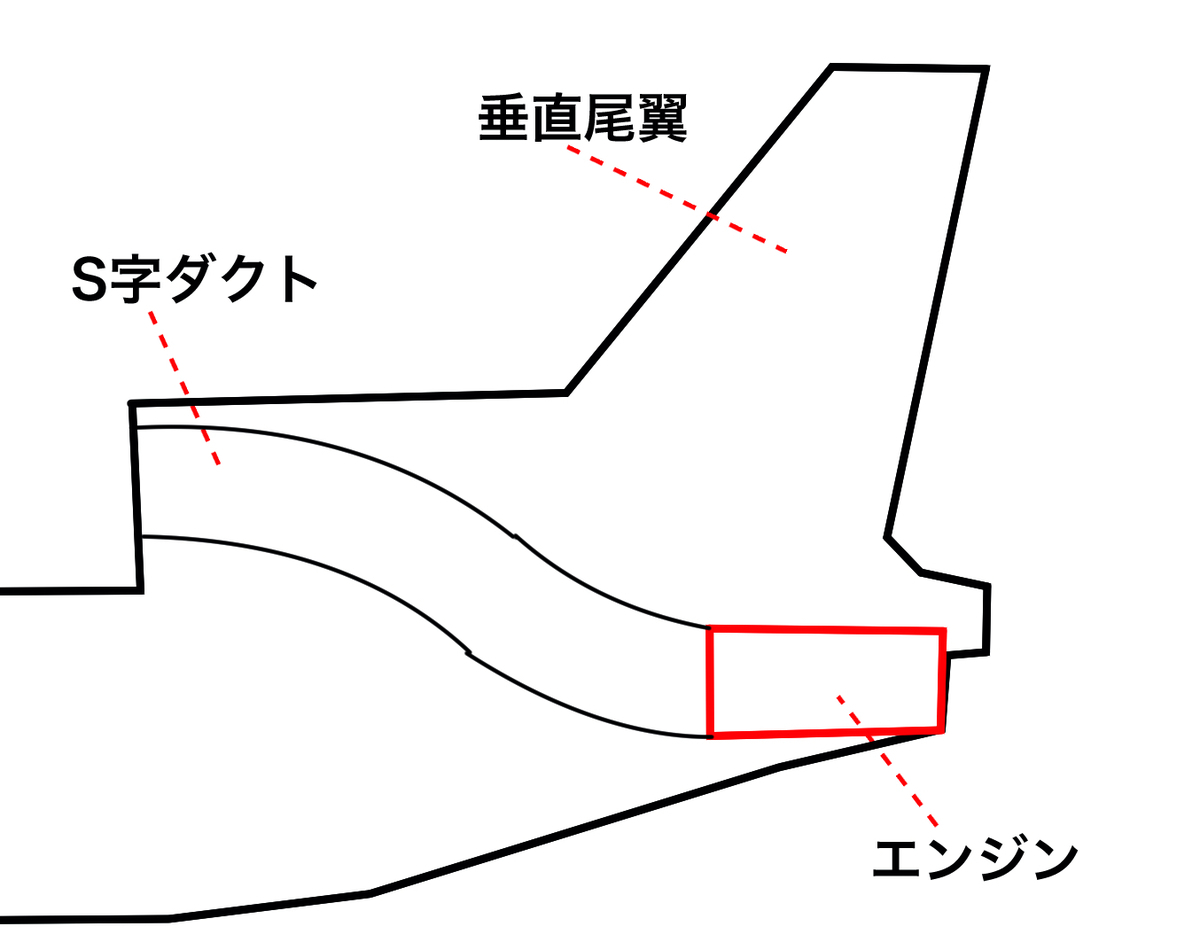
ボーイング727、ホーカー・シドレー HS121トライデント、ロッキードL-1011トライスターの尾翼エンジンは上記のような形をしていて、垂直尾翼の付け根にエアーインテークがあり、S字ダクトを通して後部のエンジンにつながっています。この配置のメリットは機体後部の気流を滑らかにすること、垂直尾翼を高くしなくても十分な面積が取れること、後ろの方までキャビンスペースが取れること、串刺し方式と比べてエンジンが後方にあるので騒音が抑えられることなどがあります。デメリットはS字ダクトで気流が剥離して、エンジンに十分な気流が共有されない可能性があるので、慎重な設計が求められます。
さて能書きはここまでにしておいて、MD-11の起動手順に移ります。
MD-11起動手順
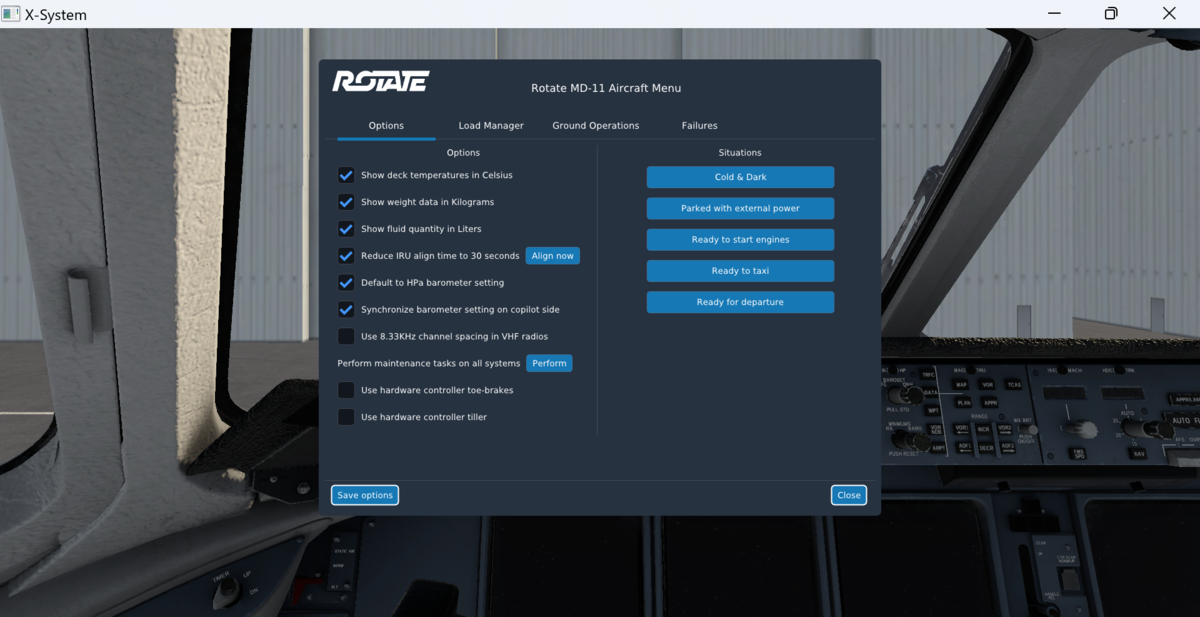
機体をロード後にメニューを表示して"Cold & Dark"からスタートします。

Load ManagerのページでTotal Payloadを42635KG、Block Fuelを16622KGと入力します。右の表のTO-CGが30〜31%MACに収まるようにPayload CGを調整して8.4%MACとします。
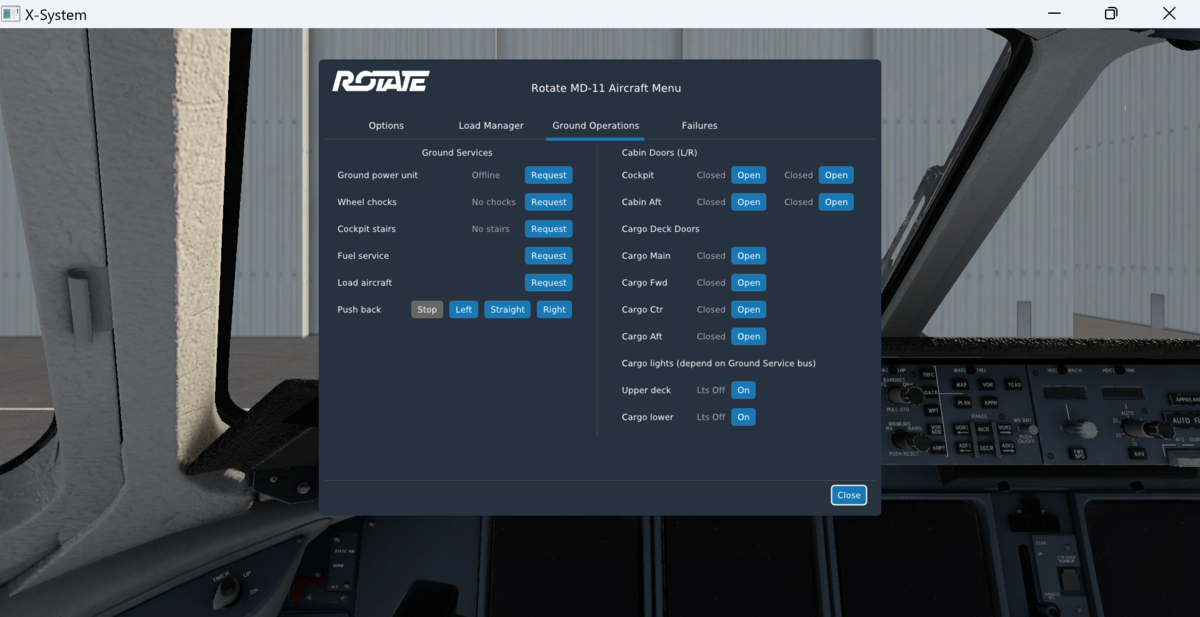
Ground Operationのページです。チョークだけ外しておきます。今回はAPUで電力をまかなうため、GPUは使いません。

まず電源を確保します。オーバーヘッドパネルで
- バッテリーをONにする
- APUをONにする
- APUの電力を機体に供給する
- APU BLEEDを機体に供給する
これでAPUをONにして、機体に電源が供給されました。

IRUをNAVにしてアラインさせます。
最初のRotateメニューの"Reduce IRU align time to 30 seconds"にチェックを入れておくと、30秒で完了します。

非常電源をARMにします。

右側のDEFOGをON、非常灯をARMにします。
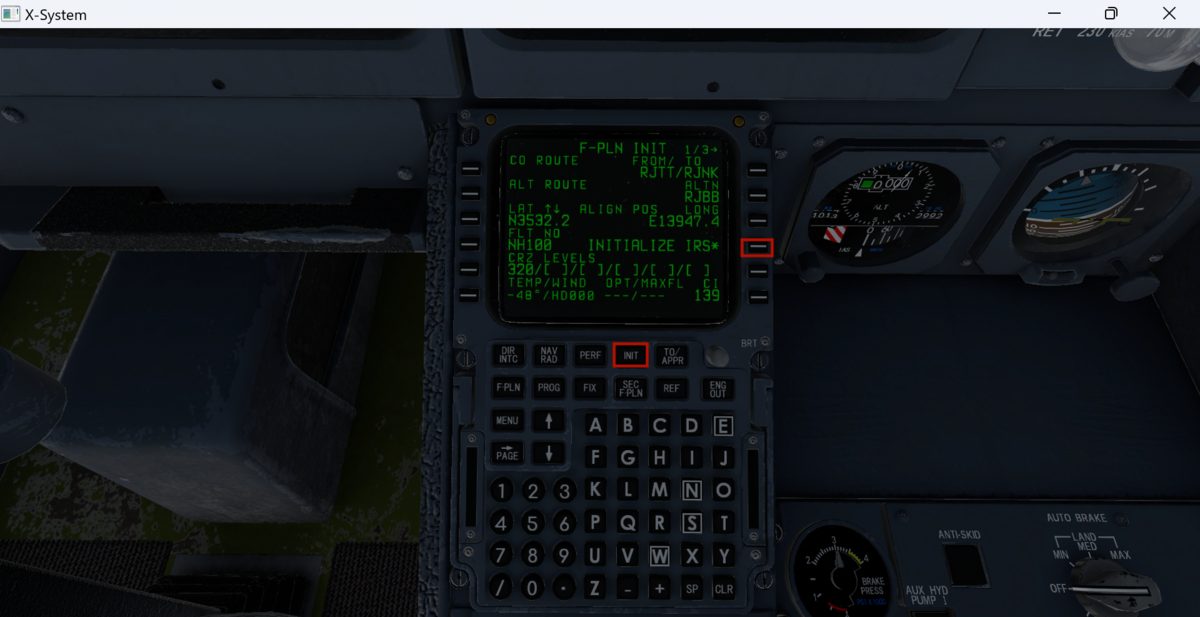
FMSの設定を始めます。INITページで各種情報を入力して、R4でINITIALIZE IRSでIRSを初期化します。

TO/APPRページで各種情報を入力するとV-speeds、トリム情報(STAB)がわかります。トリムの値(4.7)はこのあと使うのでメモっておいてください。引き続きルート設定がありますが省略します。
ノー・スモーキングサイン、シートベルトサイン、ビーコンライトをONにします。

さて、エンジン始動手順に移ります。
機長席側のオーバーヘッドにイグニッションスイッチがあるのでA or BをONにします。

エンジンは3, 1, 2の順で始動します。3番は右エンジン、1番は左エンジン、2番は垂直尾翼のエンジンです。
第3エンジンのスターターをONにします。

N2が15%くらいになったら燃料バルプを開き、点火します。これを繰り返します。

全エンジン点火後です。
エンジンによって電源とAIRが確保できているので、APUを停止させます。まず下側でAPU BLEEDをOFFにしてから、右上でAPUをOFFにします。

油圧のAUX PUMPをONにします。

MCPの設定をしてしまいましょう。速度はV2+10で160knot(本当は決まりがあったかと思いますが適当に)、方位はRJTT 34R滑走路方位である338、高度は巡航高度である32000ft(本当はクリアランス時の承認高度だったかと思います)を入力しておきます。
トリムの設定を行います。
TO/APPRページのSTABで4.7と出ているので、その設定にします。ペデスタル左側がトリムレバーでこれを上下に動かしてトリムを設定します。

この画面の数値が現在のトリム値です。これが4.7になるように設定します。ANUとはAirplane Nose Upの略で機種上げの意味です。機種下げの場合はANDと表示されます。
 さて、タクシー準備ができたので滑走路へ向けて発進します。パーキングブレーキをリリースします。
さて、タクシー準備ができたので滑走路へ向けて発進します。パーキングブレーキをリリースします。

タクシー開始です。

CONFIGボタンを押してセンタースクリーンを切り替えます。

スピードブレーキをARM(真上に引き上げる)、フラップを15に設定します。画像では抜けていますが、オートブレーキはT.Oポジションにしておきます。設定ダイアルはスロットル上部にあります。

センタースクリーンにはCONFIGが表示されているので、操縦翼面を動かして正常に動作しているか確認します。

滑走路に正対しました。AUTO FLIGHTスイッチを押して、オートスロットルをARMにします。スロットルを60%ほどまで進めるとオートスロットルは自動的に有効化されて、離陸推力が設定されます。そのままVrになったら離陸します。上昇率が正になっているのを確認してギアアップします。

400ft以上上昇後に、NAVボタンでLNAVを、PROFでVNAVを起動します。これでオートパイロット、オートスロットルが起動しているので手を離しても大丈夫です。

すると速度と方位は---と表示されます。

スポイラーのARMを解除します。

今回の紹介はここまでです。以下ギャラリーです。







以上
MSFS MD-82 Cold & Darkからエンジン始動まで
MSFS用MD-82を飛ばしたいと思います。
MD-82とは

MD-82とはMD-80ファミリーのリアエンジン方式の旅客機でDC-9, Boeing717とは技術的には同じシリーズです。ダグラス社のDC-9が原型としてあり、その後ダグラス社が買収されマクドネル・ダグラス社となり、発展形がMD-80となります。更にマクドネル・ダグラス者はボーイングに買収されたため、その発展型もBoeing方式の名前になっています。
DC-9 → MD-80 → Boeing717

リアエンジン方式のメリットは空力学的にクリーンで、見た目にも美しい主翼を手に入れることができる事です。一方で、現代の旅客機の多くは主翼下にエンジンをぶら下げています。リアエンジン方式のデメリットはエンジンが高い位置にあるため、メンテナンス性が悪いこと、ディープストールに陥りやすいことなどがあります。

cold & darkからの手順

ロード直後の画面です。すべての計器がOFFになっています。
以下の手順はチェックリストに則ったものではなく、とりあえず飛ばせれば良い手順なのでちゃんとやりたい方は付属の手順に従ってください。

機長席右側にタブレットがあります。最初は真っ暗ですが、タブレット右端のホームボタンを長押しすると、電源ONにできます。最初に、Weight & Balanceのアイコンをクリックします。

この画面では乗客数、貨物、燃料を決定する事ができます。赤字を以下のように入力していきます。
乗客数
Area A PAX: 50
Area B PAX: 50
貨物(KG)
FWD CARGO: 1327
AFT CARGO: 1327
燃料(KG)
FUEL LEFT: 3535
FUEL CTR: 4263
FUEL RIGHT: 3535
すると以下の値が求まるのでメモって置きましょう。ZFWはZero Fuel Weightといって、機体の全重量から燃料を抜いた重さ(燃料0)です。TOWはTake-Off Weightとって、離陸時の重量です。
ZFW: 49189
TOW: 60159
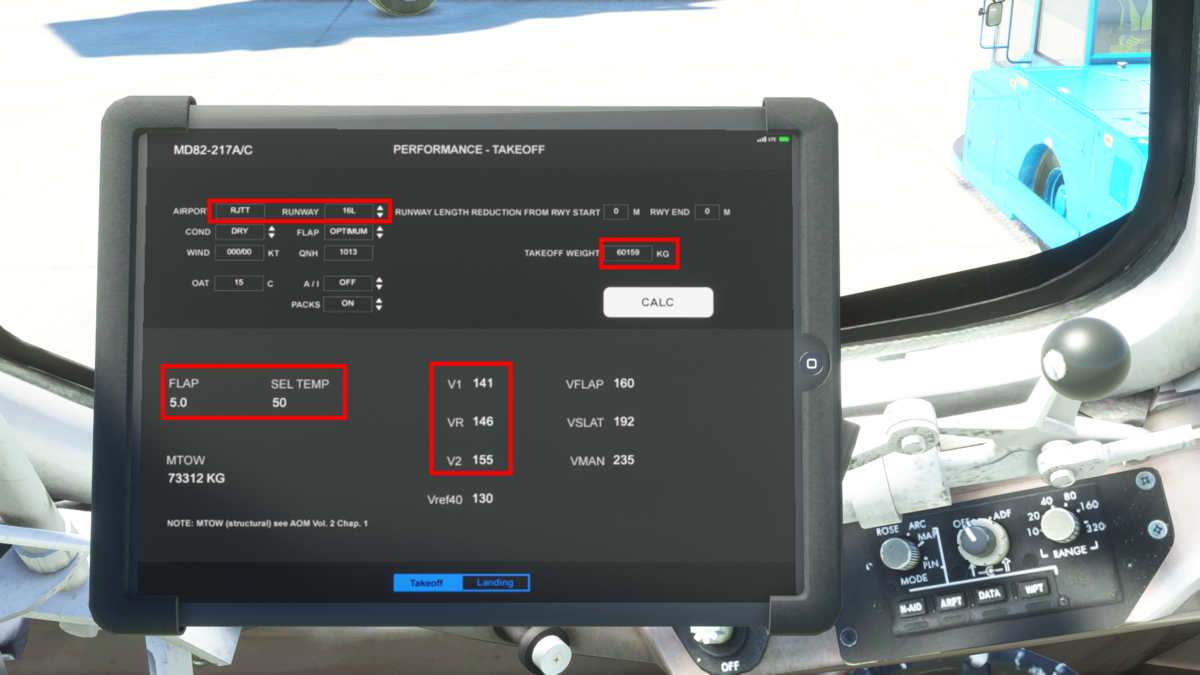
次にタブレットのホーム画面からPerformanceのアイコンをクリックします。
左上から空港名(RJTT)、離陸滑走路(16L)、先程メモしたTOWを入力してCALCボタンを押すと、離陸時のフラップ度数、V-speedがわかるのでメモしておきます。
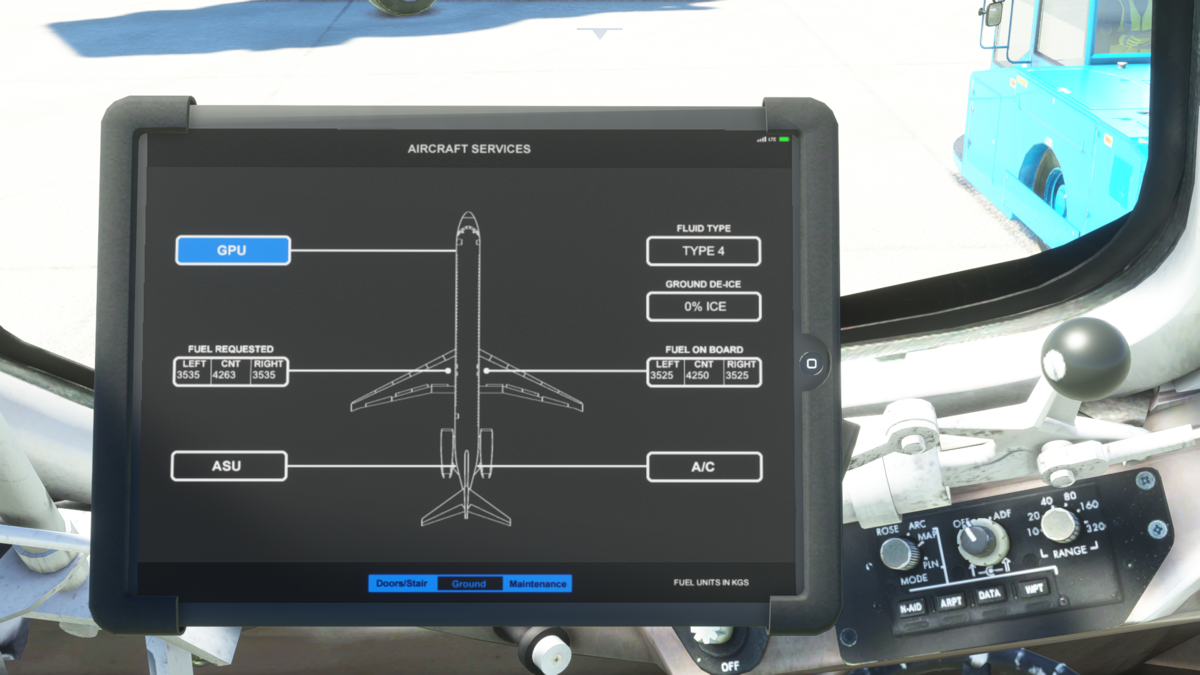
次にタブレットのホーム画面からAircraft Servicesのアイコンをクリックします。Ground->GPUをONにします。これで航空機が外部電源を使用可能になります。

オーバーヘッドパネルに移ります。
- 中央のバッテリースイッチをON(下側)にします。上の画面は誤ってOFFのままです。
- 左上のGPU(外部電源)接続をON(下側)にします。
- 中央下側の2列が燃料ポンプなので、6つをすべてON(下側)にします。
- 左下の非常灯をARMにします。ノースモーキングサイン、シートベルトサインはONにします。
- 「4.」スイッチの右側のヒーターがあるのでCAPTに合わせます。

タブレット->Aircraft Services->Doors/Stairsで乗客の搭乗を開始します。意外とこれが時間かかります。
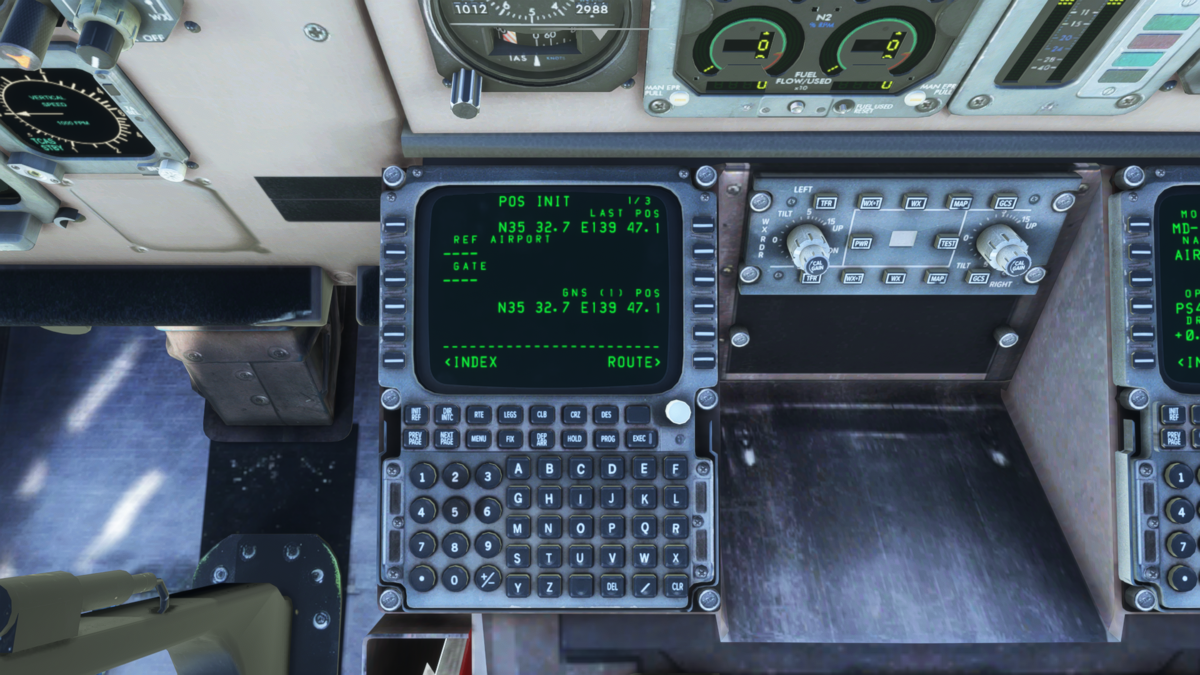
次はFMSの設定です。GPU POSのスクラッチパッドにコピーして初期位置として使用します。
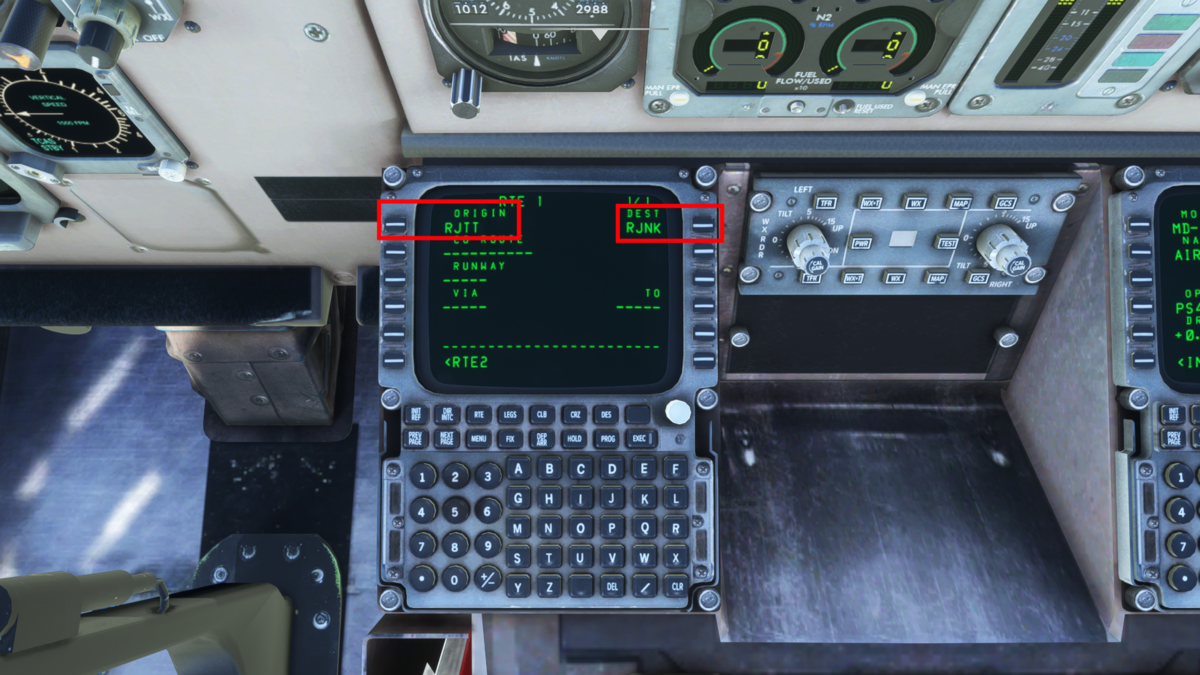
ORIGIN(出発)にRJTT、DEST(目的)にRJNKを入力します。

DEPARTURESに適切なSIDを設定します。今回の場合はRW16LからBEKLA 2A DEPARTUREを利用します。

航空路を設定します。
BEKLAからY884をYARIIまで進みます。

ARRIVALSに適切なSTARを設定します。STARはYARIIE、TRANSはKINKA、アプローチはRNV24です。

Performanceを設定します。
FUEL/SCHEDは燃料重量/A or Nで設定します。
A: 標準
N: 代替
らしいですが、詳しい意味はよくわかっていません。
最終的にこのように設定しました。

V-speedをタブレットの設定画面から転記します。ここまででFMSの設定は完了です。

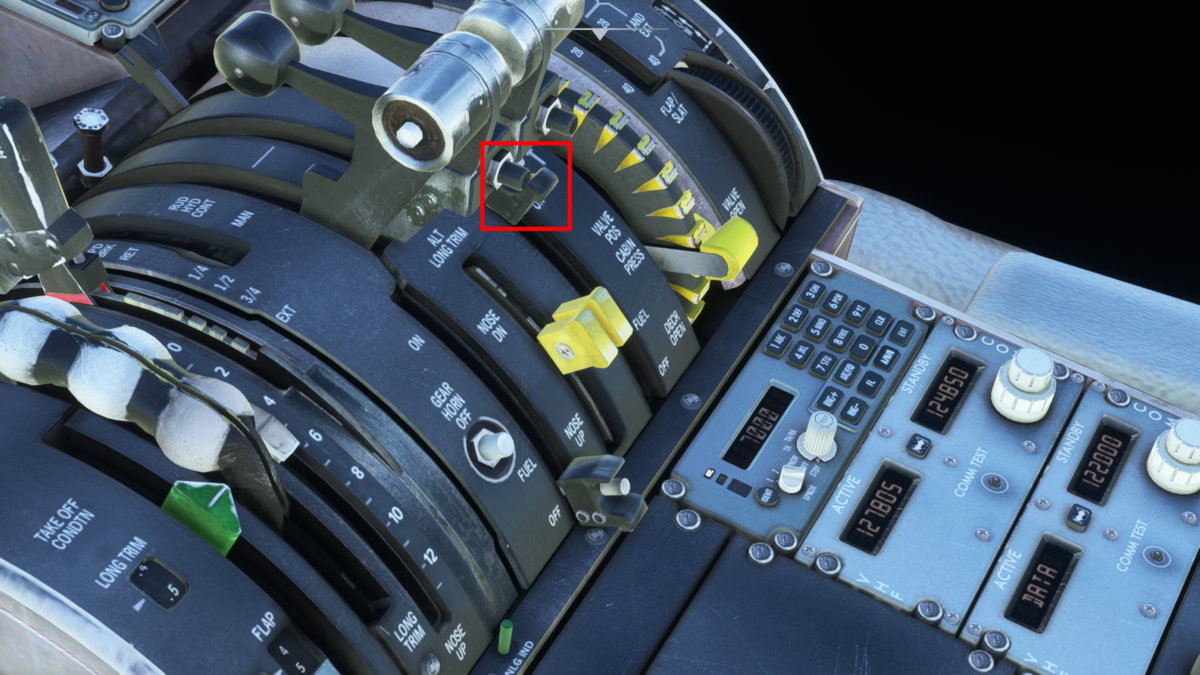
補助計器下(姿勢指示器)のボタンをクリックすると、姿勢がニュートラルになります。

次は油圧の設定です。油圧のスイッチはFO側のここにあります。

AUXをONにします。これでエンジンがOFFでも油圧システムを使用することができます。
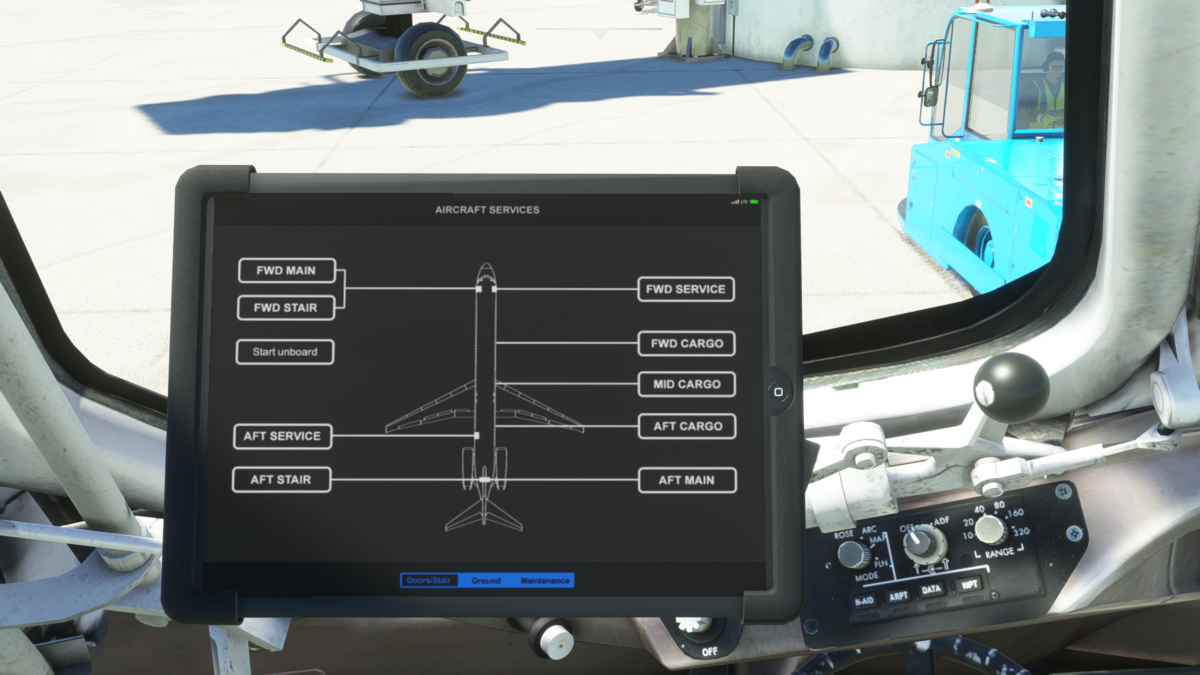
さてここまでで搭乗が終わっていると思うので、機体後部のドア(AFT STAIR)を締めます。AFT STAIRはどうも油圧が動いていないのと動作しないようです。

次はいよいよエンジン始動です。X-FEEDバルプをONにします。

このように与圧系統がつながっていて、先程のX-FEEDバルプを開かないとAPUのBLEED AIRがエンジンのスターターまで届きません。
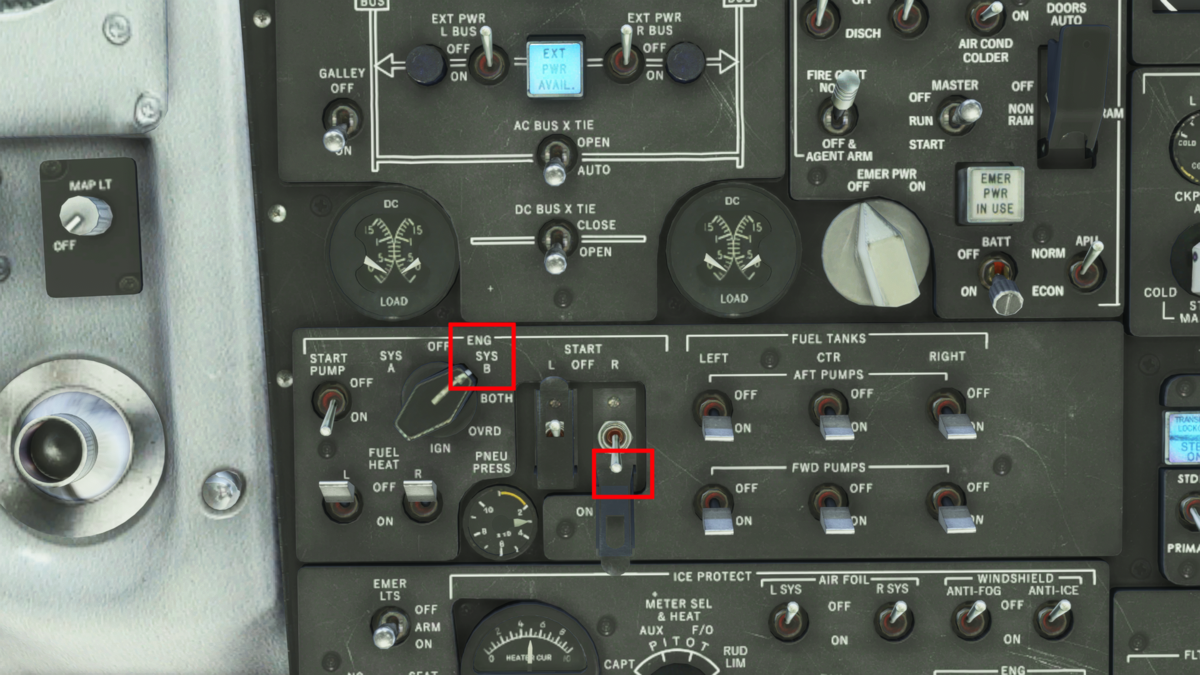
イグナイターをSYS-Bに入れて、右エンジンのスターターをONにします。

するとN2の回転数が上昇するので、20%くらいになったら以下で燃料を投入します。
右エンジンの燃料バルプを開き、エンジンに燃料を送り込みます。
同様のことを左エンジンに対して実施します。
ここまでやったらCold & Darkからの起動は完了です。

MD-82は飛行状態をTO(離陸推力)、TO FLX(FLX離陸推力)、GA(Go Around)、MCT(最大連続推力)、CL(上昇推力)、CR(巡航推力)と設定します。
INS用に座標をDDからDMに変換する方法
INSへの入力はDM形式の座標でやる必要があります。一方でSimBriefが作成する.fmsはDD形式で座標なので変換が必要です。今回はエクセルでの変換方法を紹介します。
(SimBriefのテキストのフライトプランではDM形式になっていますが、一覧にはなっていないので使い勝手が悪く感じます。)
座標の表記法であるDMS形式、DM形式、DD形式は以下を御覧ください。 libayanel.hatenablog.com
1. SimBriefでフライトプランを作成し、Xplane11形式でダウンロードする
2. エディタで.fmsを開き、半角スペースをカンマ","に変換してcvsファイルにリネームする。
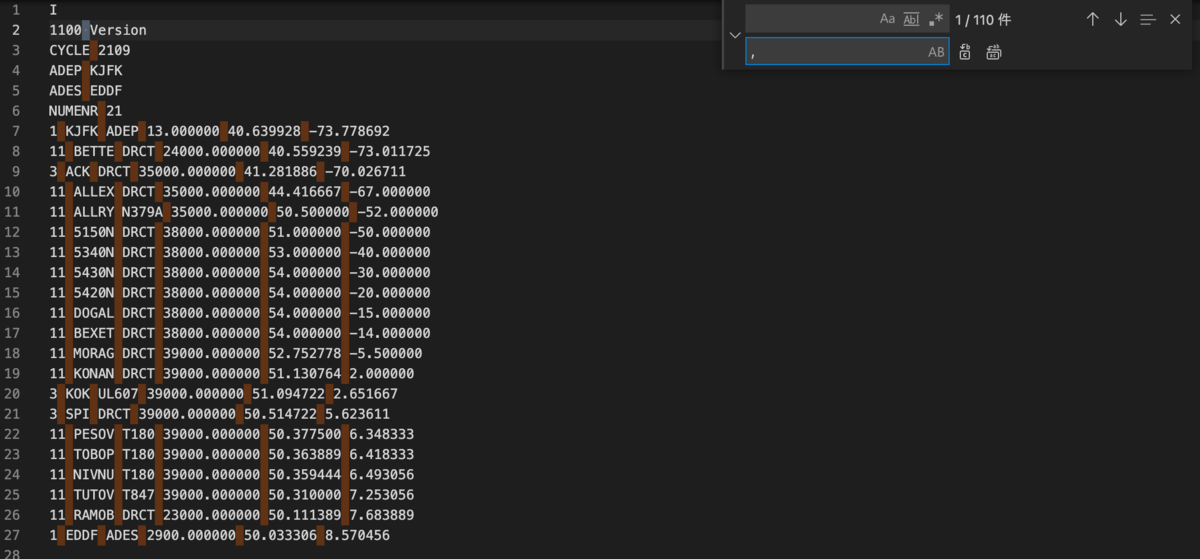
変換後↓

.fmsを.csvにリネームしてエクセルで開けるようにする
3. エクセルで開いて以下の手順で編集 (筆者はGoogle docを利用)

- A-F列がもともとの内容。Eが緯度、Fが経度。
- 緯度がプラスなら北緯、マイナスなら南緯を表す
- 経度がプラスなら東経、マイナスなら西経を表す
- G列に0から9、1-9の番号を振る。これがINSの番号となる。
- H列がE列を変換した緯度、以下の式を入力する。(経度も同様にF列->I列に変換する)
=SIGN(E6)*(INT(ABS(E6))*100+ROUND(ROUNDDOWN((ABS(E6)-INT(ABS(E6)))*3600/60,0)+MOD((ABS(E6)-INT(ABS(E6)))*3600,60)/60,1))
緯度、経度の書式を設定してゼロ埋めをおこなう

緯度は0000.0

- 経度は00000.0

これでDM形式の座標一覧が得られる(再掲)
あとはせっせとINSに入力するのみ。。。
変換が正しいか不安な場合は以下から変換もできます。検算にご利用ください。
www.directionsmag.com