X-Plane 11 DHC8-Q400 Cold & Darkからエンジン始動~着陸まで

今回はDHC8-Q400をCold & Darkからエンジン始動〜着陸までを順を追って紹介したいと思います。Q400は高翼式の双発ターボプロップ機でコミューター機として多く使われています。前回紹介したSaab 340と違うところはデフォルトでFMS、APUが装備されており高性能な機体です。
機体はXplane 11用にFlyJSimが開発したQ4XPです。実はFlyJSimはQ400を以前にリリースしておりQ4XPはそのアップグレード版です。古い方をQ400 Legacy、新しい方をQ4XPと呼んでいます。ですので購入する際は注意してください。
以下が公式のマニュアルですが、これでは情報不足のため追加の資料をゲットします。
P3D用のQ400であるMajestic Q400の3つマニュアルをダウンロードしてください。
1つ目はQ400のV-speedのチャートです。Metric版をクリックしてダウンロードしてください。
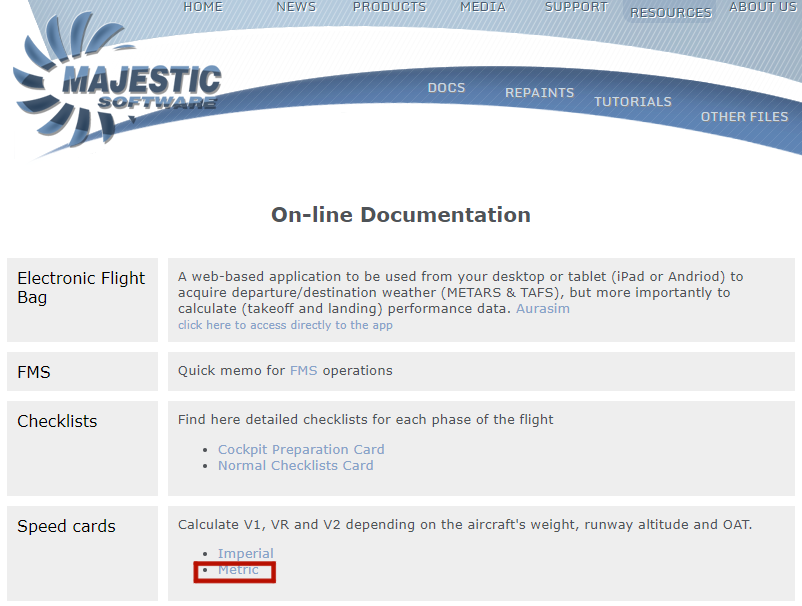
http://majesticsoftware.com/mjc8q400/downloads.html
2つ目はQ400のシステム全般が解説されているマニュアルです。PDFの直リンクです。
「MJC-8 Q400 Normal Operations System Manual」
http://majesticsoftware.com/mjc8q400/docs/SystemDescription.pdf
3つ目は巡航時のトルクを求めるためのチャートです。PDFの直リンクです。
「PerformanceManual」
http://majesticsoftware.com/mjc8q400/docs/PerformanceManual.pdf
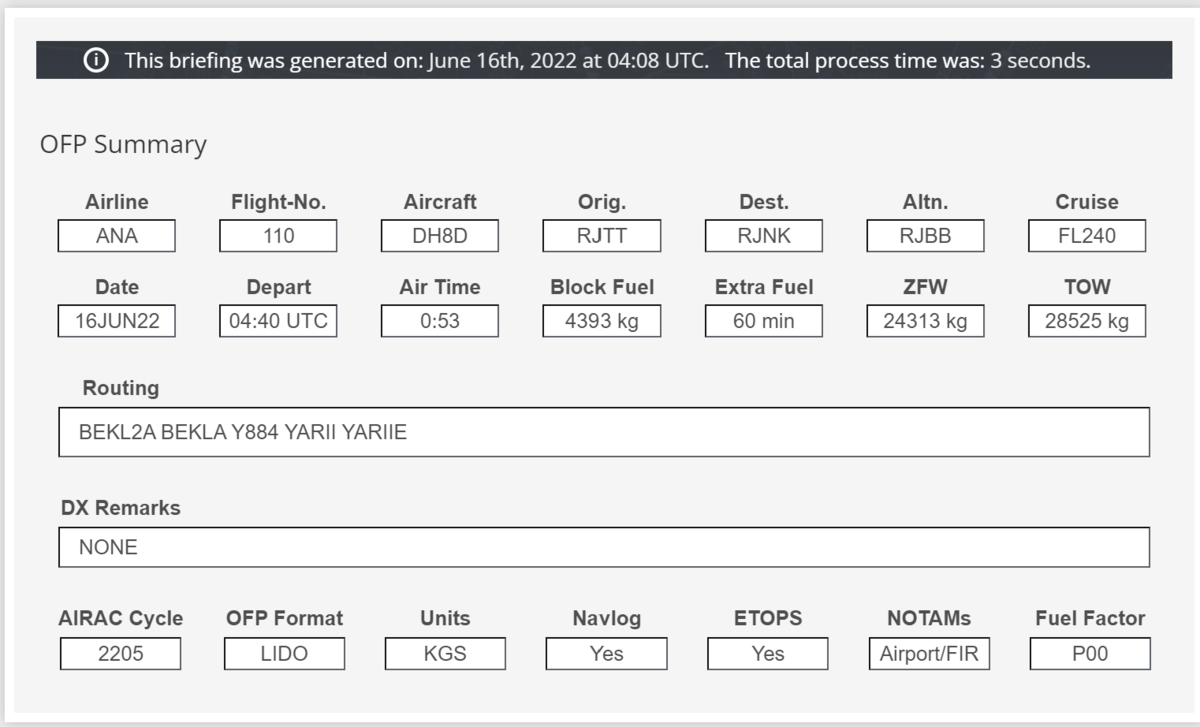
今回のフライトプランです。SimBriefで作成しました。
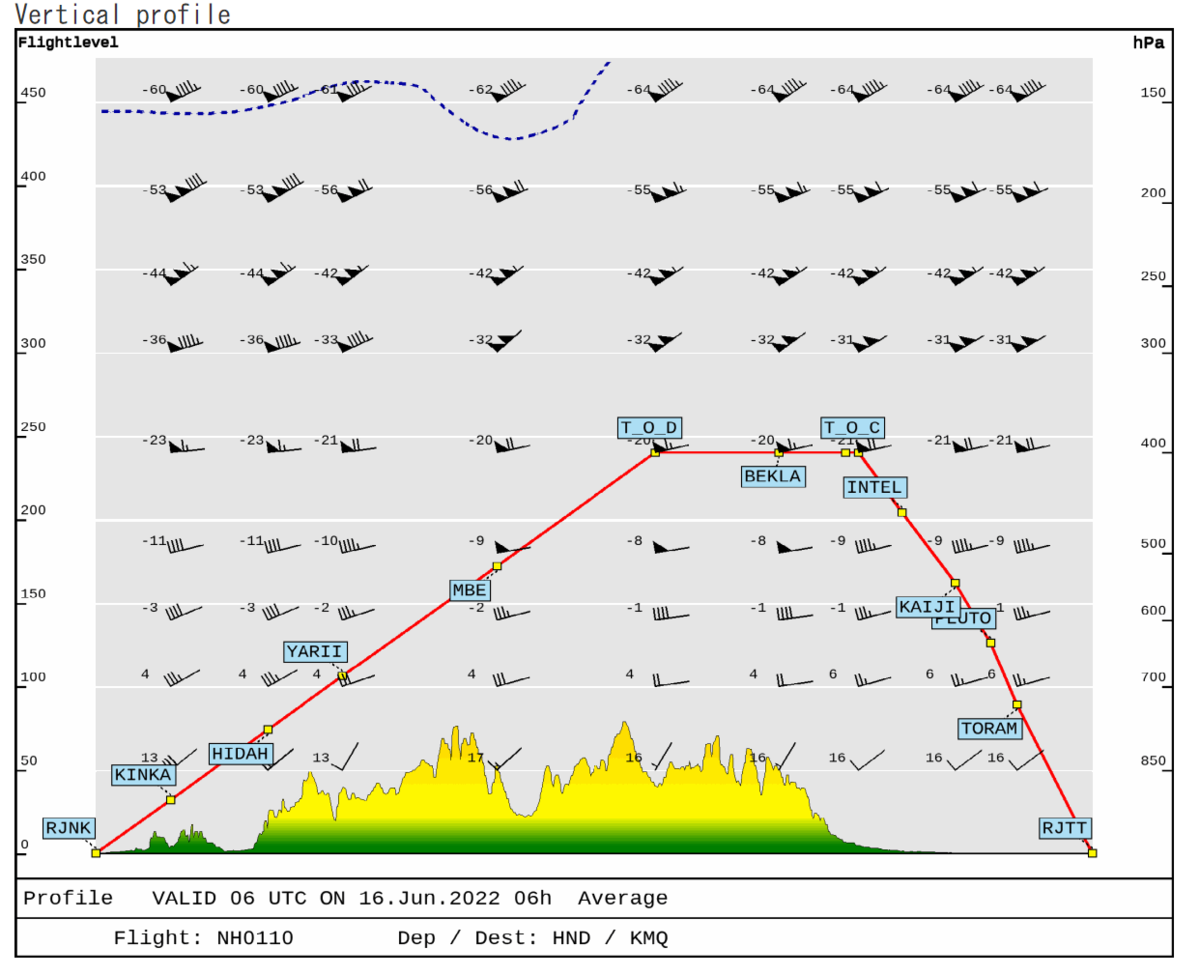
垂直プロファイルです。BEKLA前にT/C、MBEの前にT/Dですが諸事情により今回のフライトは巡航高度をFL220に変更するため降下ポイントがずれます。(上記はFL240の場合の表)

Q400のロード直後です。RJTTの適当なランプに駐機しています。Cold & Dark状態なので電源は入っていません。Cold & Darkから毎回電源を入れるのは面倒な作業の連続ですが、システムの理解と達成感を得られます。

EBFからペイロード、グランドサービスの設定、チェックリストの表示をします。EBFは各アドオンメーカーの特色が出て面白いです。Q4XPの場合は乗客数、貨物はもちろん手動で編集可能ですが、ZFW自体を編集することも可能なので使い勝手が良いです。ZFWを編集する場合は、乗客数、貨物は自動で設定されます。
また、通常チェックリストはPDF形式で添付されることが多いのですが、Q4XPはPDFではなくEBFのみの表示になっています。

Q4XPの設定画面です。デフォルトの機体状態、ステアリング、使用単位などを設定しておきます。一度設定すれば保存されます。
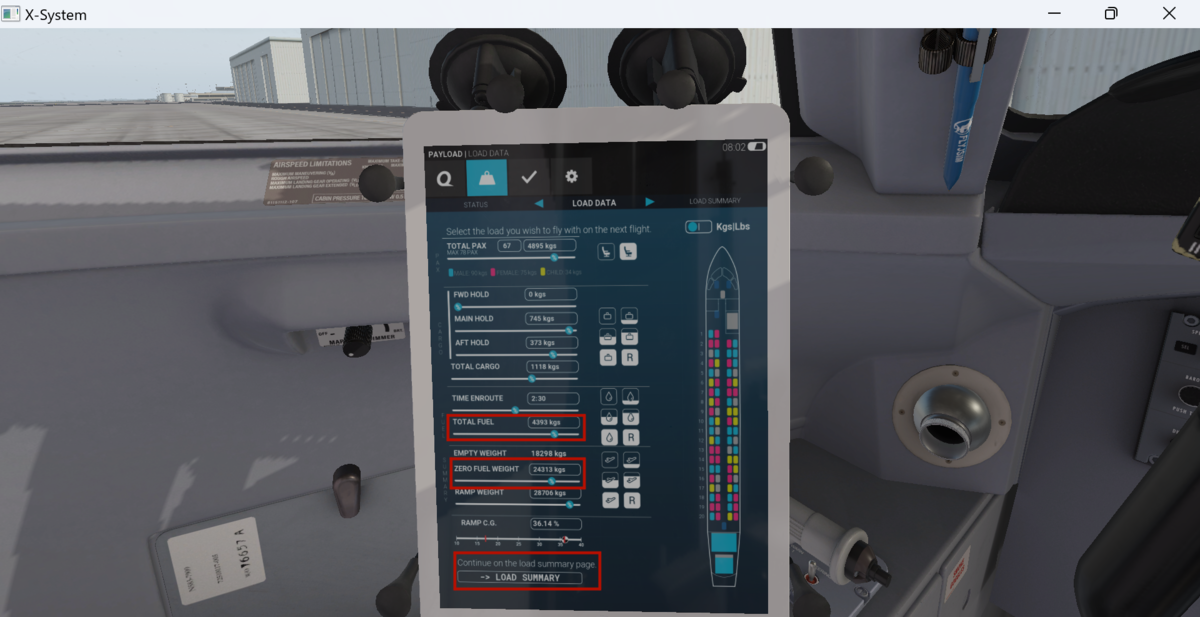
ZFE: 24313 KG
FUEL: 4393 KG
と設定して、LOADします。
乗客数、貨物を手動で設定したい場合は上の方を直接設定してください。ZFWを編集するとそれらは自動的に設定されます。
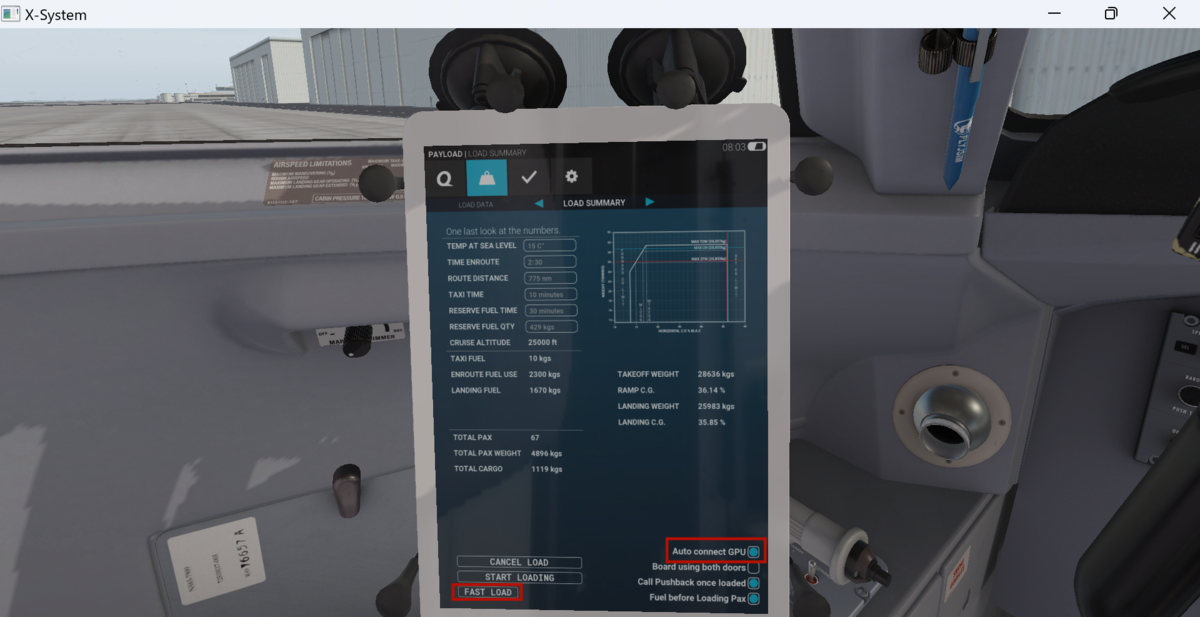
FAST LOADを押すと一瞬で積み込みが完了します。
Auto connect GPUにチェックを入れて自動的にGPUに接続されるようにします。エンジン始動にはGPU or APUが必要ですが今回はGPUのみを使用します。

機体のバッテリーをONにします。STBY, AUX, MAIN, BATTERY MASTERをすべて下に倒してONにします。次にEXT PWRをONにして、外部電源を接続します。
エアラインの場合は整備士の方がバッテリーをつけるくらいはやってくれるのでしょうか、気になります。

空調の設定です。RECYCLIC FANをONにして機体の空気を循環させます。

POSN(ポジションライト)、FASTEN BELTS, NO SMOKINGをON、EMERをARMにします。ポジションライトはナビゲーションライト(NAV)とも呼ばれ、主翼の両端が緑と赤にそれぞれ点灯します。右側がみどりと記憶しておきます。機体の電源が入っている間は点灯させる必要があります。
ちなみにアンチコリジョンライトとビーコンライトは同じ意味で、機体の上下のライトが点灯します。なぜ同じ意味で違う名前が使われているのかよくわかっていませんが、始めたのときは分かりづらかったですね。このライトはエンジン起動中はずっと点灯させます。

ANTI SKIDをONにします。ブレーキ使用時にタイヤをロックしないようにするためのものです。これをON/OFFする機体はあまり見たことがないです。ボーイングやエアバスはデフォルトでONだったような気がしています。

バッテリーを接続しただけだとモニターは真っ暗なままなので、モニターの電源を片っ端からONにしていきます。赤字の部分を設定してください。
PFD,MFD, CDU, COM(予備)の電源を入れます。
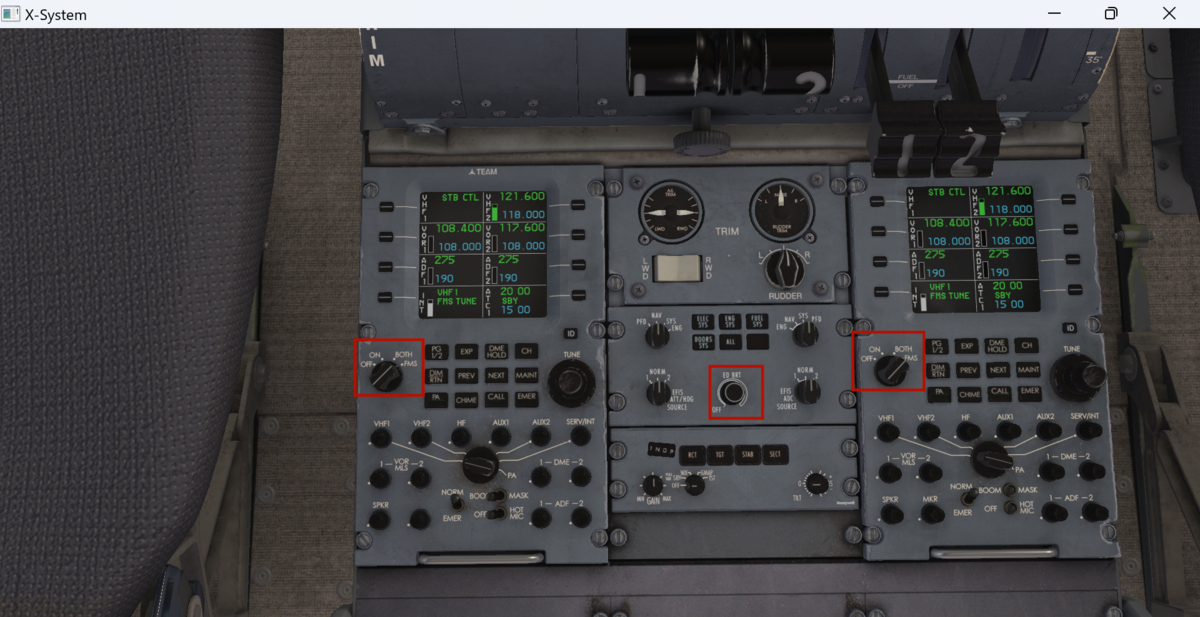
前項の続きです。無線、EDの電源を入れます。無線はAudio and Radio Management system (ARMS)という統合システムにまとめられています。
ARMSのノブをFMSに設定しておきます。
ARMSのノブにはOFF, ON, BOTH, FMSの4つのポジションがあります。
ON: 左右のARMSは独立して動作する。
BOTH: 左右のARMSは同じ内容を示す。
FMS: 無線設定がFMSによって上書きされる。MCPのAPPRボタンを押すとVOR/ILSの設定がFMSで選択済みの設定に上書きされる。(VOR/ILSアプリーチの場合に限る)

CDUの入力を開始します。ACCEPTを押します。ボーイングやエアバスのCDUに慣れている人は注意が必要です。Q400のCDUにスクラッチパッドはなく、設定したい項目のボタンを押し編集可能にしてから直接入力するスタイルです。なので、単にキーボードを押しても下に入力文字は出ません。

フライトプランの設定をします。FPLを押してL1を押します。RJTTがなかったらそこから入力してください。次にMENUを押します。
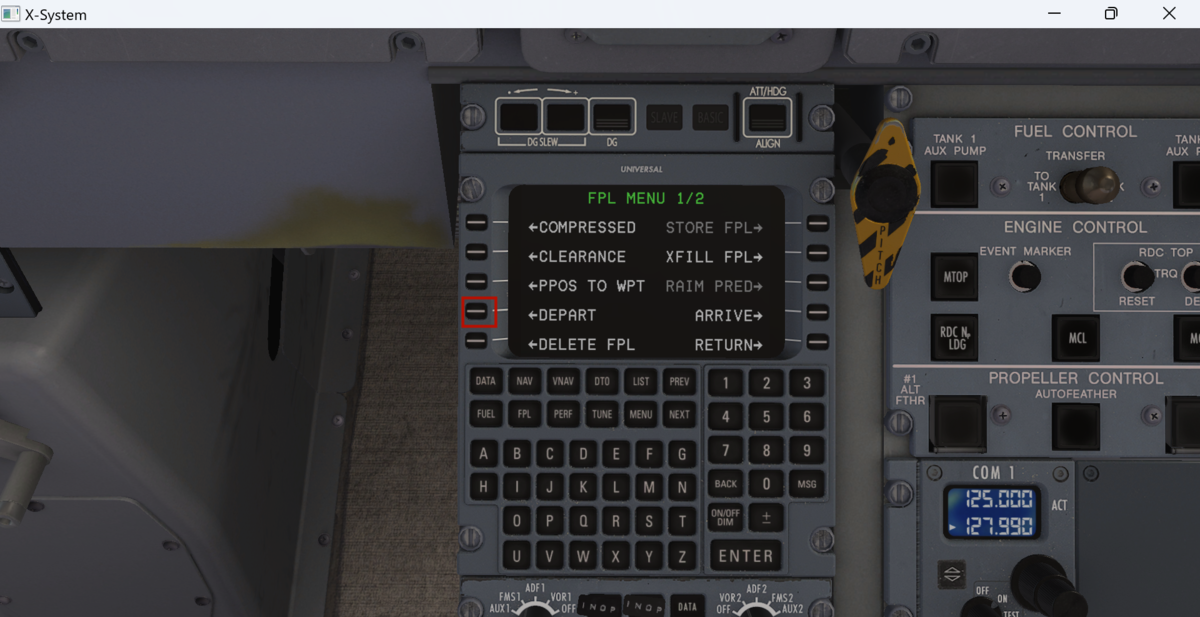
DEPARTからSIDを選択します。

滑走路、SIDの候補が番号で示されるのでその番号を上記の押して、ENTERします。

SIDの終端であるBEKLAの下9番目を押して編集可能にします。

R2で航空路Y884(2番)を選択します。ここも番号で指定します。

続きです。

Y884をYARIIまで進むので3番を選択します。

最後に目的地であるRJNKを入力します。

SIDの選択と同じように、STARを入力します。
STAR: YARIIE
APPR: RNV 24 (TRANS: KINKA)
このあたりはchartを見て適切に選択します。
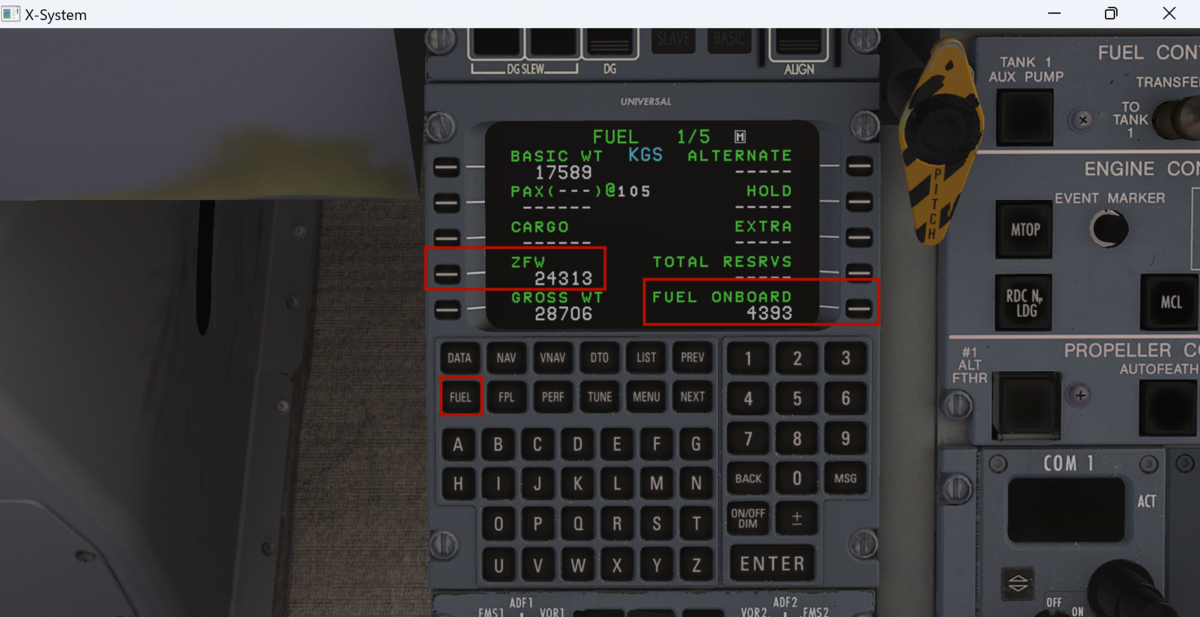
FUELを押してZFW、FOBを入力します。
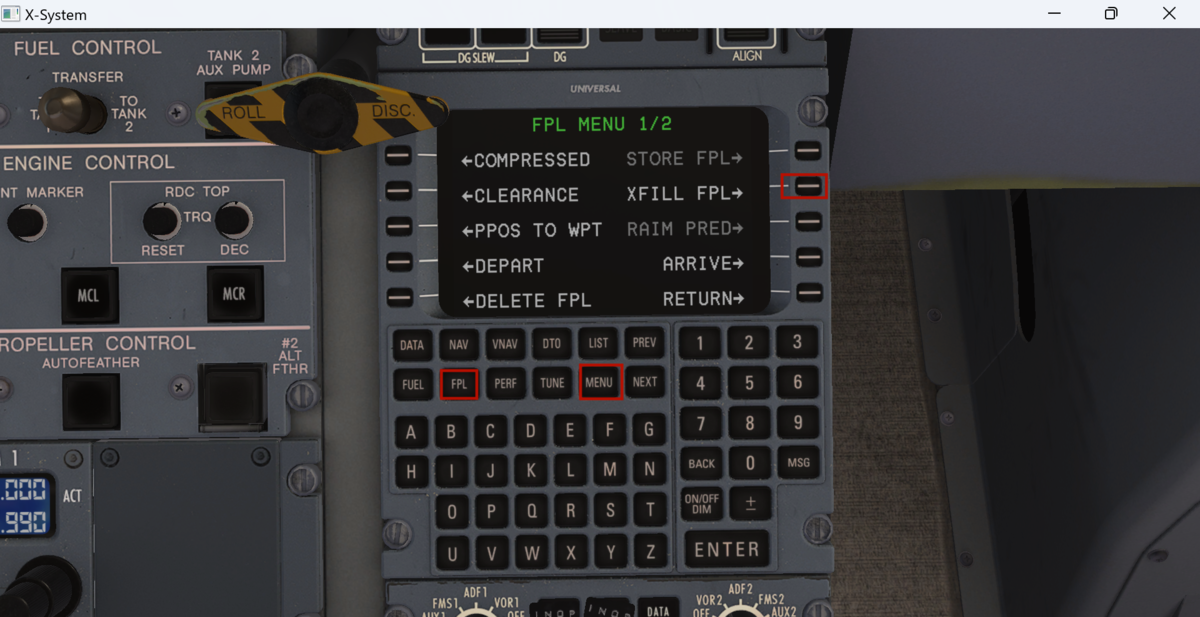
このアドオンでは機長側、副操縦士側のCDUは独立して動きます。そのため副操縦士側に機長側で設定したデータをコピーします。FPL -> MENU -> XFILL FPLでコピーできます。
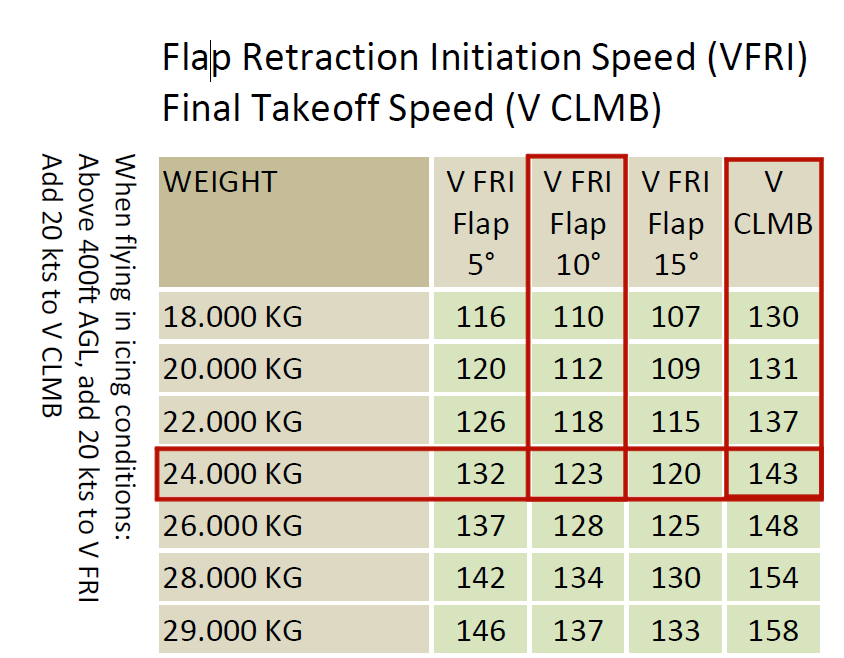
V-speedを計算していきます。Q4XPにはチャートが付属していなかったので、Majesticのデータを拝借します。Vfri/Vclimb=123/143とも止まります。アンチアイスを使用する場合は+20knotします。フラップは10°で離陸します。

Vr/V2=109/113となります。こちらもアンチアイス使用の場合は+20knotしてください。V1はVrと同じとします。V1, Vr, v2をPFDに設定してください。

エンジン始動手順を開始します。アンチコリジョンライトをREDにします。エンジン始動は一番ワクワクするポイントです。

機長側ナビゲーションソースをNAV SOURCEノブをいじってFMS1に設定します。
ところで機長席がなぜ右側なのか疑問に思ったことはないでしょうか。ネットで調べると船が左に接岸する名残だというのが見つかりました。なぜ左側に接岸するのかはよくわかりませんでしが、子供向けの「航空機のひみつ」という書籍で答えが見つかりました。これによると初期の船は右側に舵がついているために、左側に接岸するようでした。ベネチアの船をイメージしてみてください。観光客が前に乗り、一番うしろにオールを持って操舵するおじさんがいます。「ベネチア 船」で画像検索するとわかりますが必ずおじさんは船の右側にオールを突き出して操舵しています。すると左側に接岸するのは納得です。
右側機長席は世界共通なので変わることはないと思いますが、どこかの法令に明文化されているのか?という点は気になりますね。
余談が長くなりましたが、エンジン始動の続きです。
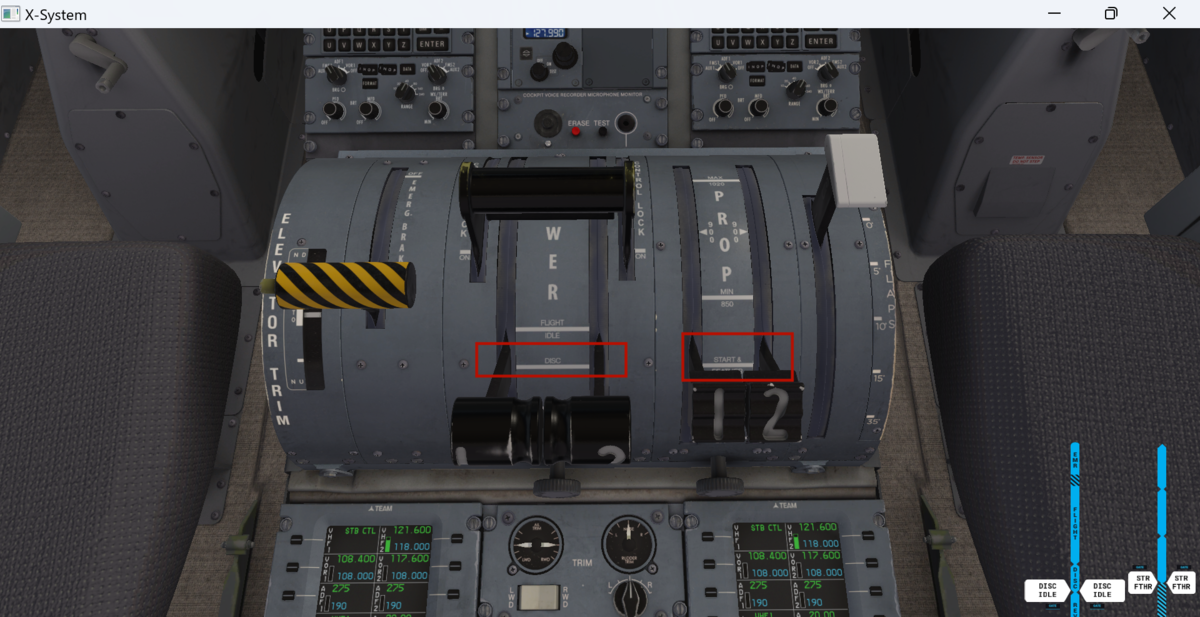
パワーレバーをDISC IDLE(地上アイドル)、コンディションレバーをSTR FTHR(スタート、フェザー)に設定します。
プロペラ機には固定ピッチプロペラと可変ピッチプロペラの2種類があります。固定ピッチプロペラはプロペラのピッチが固定されておりRPM(回転数)を上げるとより推力が得られます。固定ピッチプロペラで速度を出そうとすると回転数を上げる必要がありますが、回転数には上限があります。一方可変ピッチプロペラはピッチが調節でき、固定ピッチプロペラより回転数が小さくてもピッチを調節して同等の推力を得ることができます。Q400は可変ピッチプロペラで、コンディションレバーでプロペラ回転数を制御します。コンディションレバーでプロペラピッチを直接制御するのではなく、指定した回転数になるようにガバナーがピッチを調節します。例: 1000RPMが指定された場合、現在のRPMが1100の場合は、ガバナーがプロペラピッチ角度を上げて抵抗を増やし、回転数を落とします。

#2エンジンをSELECTしてSTARTボタンを押します。するとモーターがエンジンの高圧軸を回転させ、燃料を噴射&点火します。同じ手順を#1エンジンにも適用します。
本当は高圧軸回転数が一定値になったらコンディションレバーをSTR FTHRにして燃料を送り込むのですが、筆者の環境では#1, #2のコンディションレバーを個別に動かせなかったため、最初にSTR FTHRの位置に設定してしまっています。
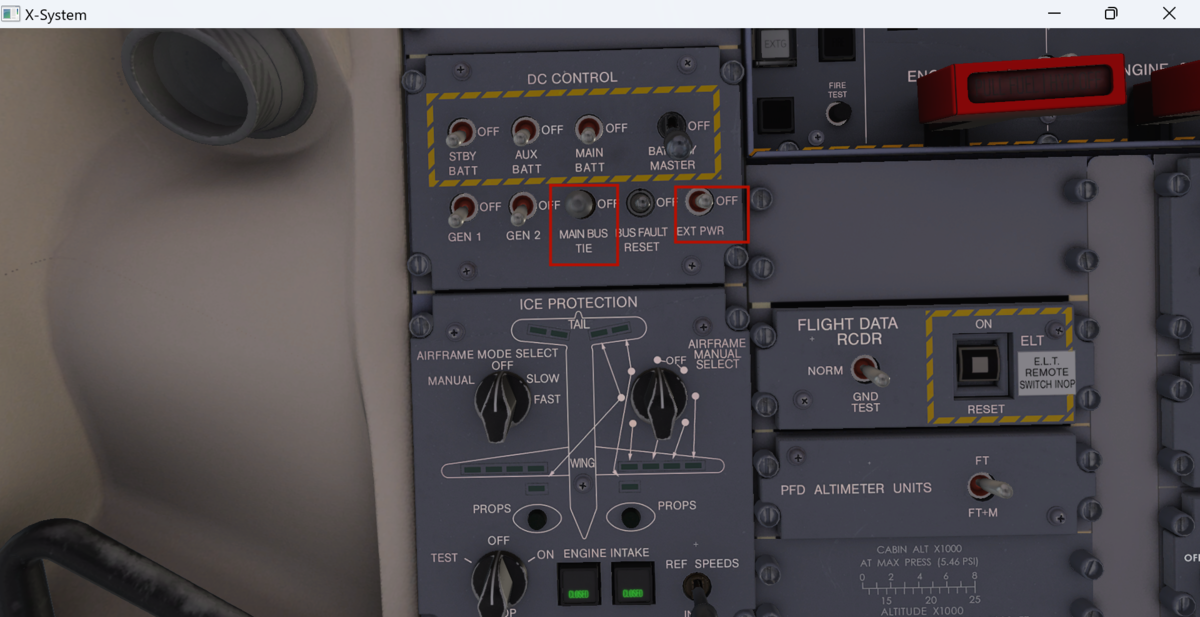
エンジンの発電機が動いているので外部電源が不要になりました。APUをつけている場合はここでOFFにしてください。
MAIN BUS TIEとEXT PWRをOFFにします。

コンディションレバーをMAX(1020)にします。

ここからは予備の油圧、燃料系統をONにします。これらの設定は離着陸時にだけONにします。
STBY HYD PRESS(予備油圧系統), PTU CNTRLをONにします。

予備燃料ポンプAUX PUMP#1, #2をONにします。AUTO FEATHERをONにします。AUTO FEATHERは離着陸時にエンジンに問題が発生した場合、自動的にプロペラをFEATHER状態にしてくれます。ここまでの設定は離陸後はOFFに戻します。

ステアリングスイッチをONにします。Q400の場合、この設定をしないとステアリングが操作できないので重要です。

スポイラーモードをTAXIにします。
Q400ではスポイラーは自由に使うことはできず自動的に使用され、スポイラーモードで制御します。スポイラーモードにはFLIGHTとTAXIの2ポジションがあります。
FLIGHT: スポイラーはロールシステムの一部としてエルロンと協調して動作し、原則用途には使用できません。
TAXI: スポイラーはロールシステムから切り離されます。
地上にいる場合はTAXI、離陸前にFLIGHTにせっていします。
着陸の瞬間に自動でスポイラーは全展開されFLIGHT->TAXIに自動遷移します。

ヨーダンパーをONにします。
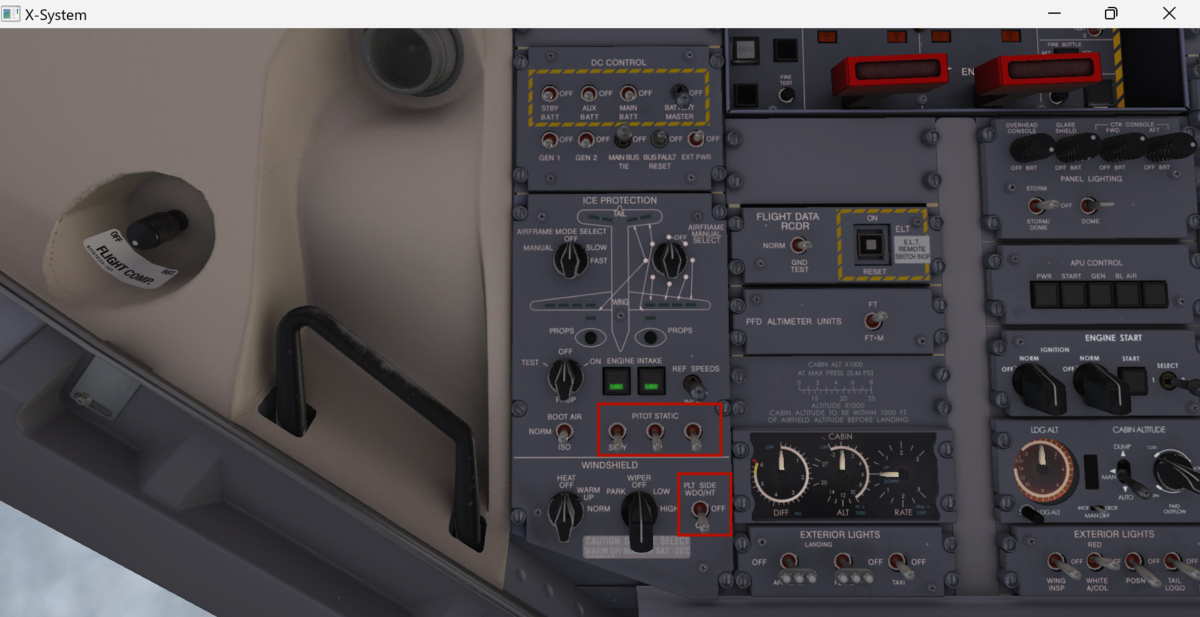
アンチアイス用の設定です。PITOT STATICの3つをONにします。PLT SIDE WOD/HTもONにしています。

地上走行を開始する前にTAXIライトをONにします。

パーキングブレーキをリリースします。滑走路に向かいます。

滑走路に到着しました。アンチコリジョンライトをWHITEにします。ランディングライトをONにして、TAXIライトをOFFにします。

トランスポンダーをTA/RAにします。R4 -> EXP -> L3の順に押していきます。

スポイラーをFLIGHTモードにします。フラップを10°に設定します。

すべての準備が整ったコックピットです。

パワーレバーのGOボタンを押します。

パワーレバーをFLIGHT RATINGまで進めると離陸推力がセットされます。

離陸しました。ギアアップします。

オートパイロットを設定します。
APボタンでオートパイロットの有効化をします。
NAVボタンでLNAVを起動します。
ALTボタンを2回押し一度GAモードを解除し、IASモードを起動して185knotをNOSE UP/DOWNノブで指定します。ALTノブでFL220を指定しALT SELボタンを押します。
ボーイングやエアバスに慣れている方はMCPの垂直モードの設定に注意が必要です。
IASモード: 指定速度を維持する。NOSE UP/DOWNノブで速度を指定する。オートスロットルはないため加減速するために高度が変化する。(速度が低い場合、下降して加速する)
VSモード:指定垂直速度を維持する。NOSE UP/DOWNノブで垂直速度を指定する。オートスロットルはないため速度は一定にはならない、手動で調整する必要がある。
VNAVモード: 下降専用のモード。FMSで指定したとおりに降下する。
ALTモード: 現在高度を維持する。
ALT SELモード: IAS, VS, VNAVモードと組み合わせて使用する。この3つモードはALTノブで高度を入力してもそれを無視する。従ってその高度に到達したら上昇/下降をやめたい場合は、ALT SELを同時に有効化させる必要がある。指定高度に到達するとALTモードに移行する。

左側にLNAV、右側にIAS 185, ALT SELが表示されていればOKです。速度が185knotになっていることも確認してください。
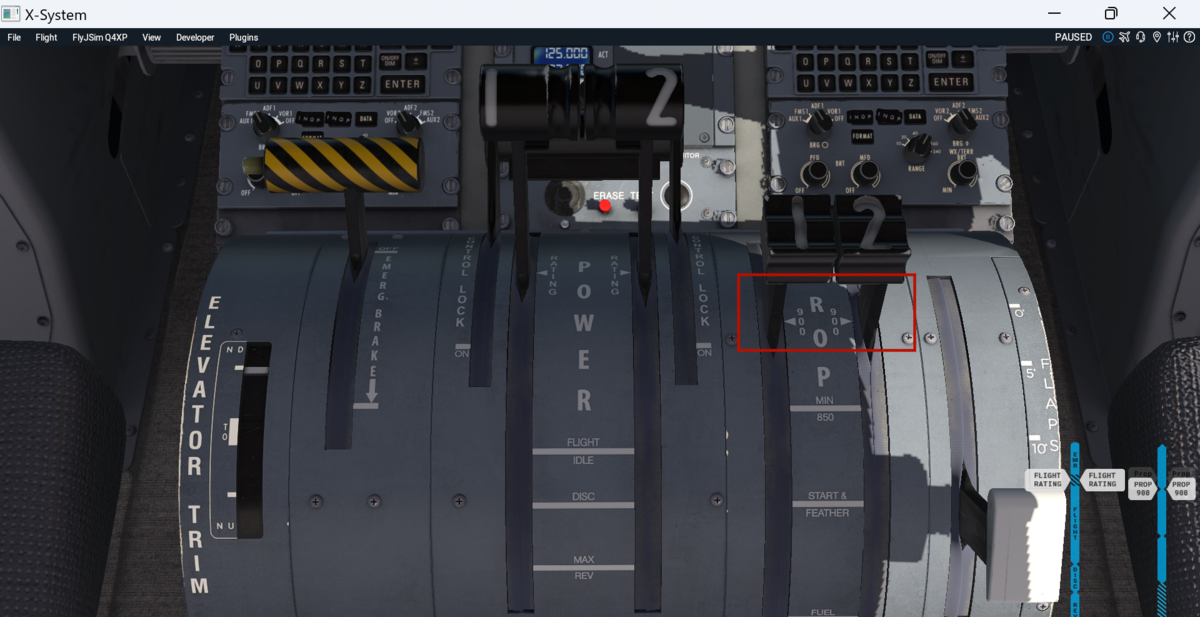
コンディションレバーを900に設定します。

MCLボタンを押し最大上昇推力をセットします。ここでENGINE CONTROLパネルについて説明します。
- MTOP: Maximum Take off Power(最大離陸推力)をセットします。コンディションレバーをMAX 1020に設定後、MTOPボタンを押し、パワーレバーをRatingポジションに設定します。
- RDC TOP: Reduced Take off Powerをセットします。コンディションレバーをMAX 1020に設定後、DECボタンを押すたびに離陸推力が2%減少するので意図する推力を設定してください。RESETボタンを押すとリセットされます。その後、パワーレバーをRatingポジションに設定します。
- MCL: Maximum Climb Rating(最大上昇推力)をセットします。コンディションレバーを900に設定し、MCLボタンを押し、パワーレバーをRatingポジションに設定します。
- MCR: Maximum Cruise Rating (最大巡航推力)をセットします。コンディションレバーをMIN/850に設定し、MCLボタンを押し、パワーレバーをRatingポジションに設定します。実はコンディションレバーがどの状態にあっても850RPMで上書きされてしまいますが、混乱するためコンディションレバーはMIN/850にしておくことをおすすめします。
- RDC Np LDG: (Reduced Np Landing)モードを起動します。着陸時は通常はコンディションレバーはMAX/1020にしますが、このモードを起動すると着陸時は850RPM(指定のRPM)でGA時には自動的に1020RPMをセットすることができます。このモードを有効にするには、コンディションレバーを目的のRPMモード(850)に設定してから、RDC Np LDGを押し、コンディションレバーを60秒以内にMAX/1020まで進めます。いずれかのパワーレバーが移動範囲の半分を下回っている場合、このモードに入ります。すべてが正しく設定されている場合、航空機が着陸するまで、またはパワーレバーがゴーアラウンドのために前進するまで、より低いプロペラ速度を維持します。パワーレバーがRatingポジションに入った場合、即座にプロペラに1020RPMになります。

STBY HYD PUMP, PUT CTRL, FUEL AUX PUMP#1, #2, AUTO FETHERをすべてOFFにします。これらは着陸前にすべてONにします。
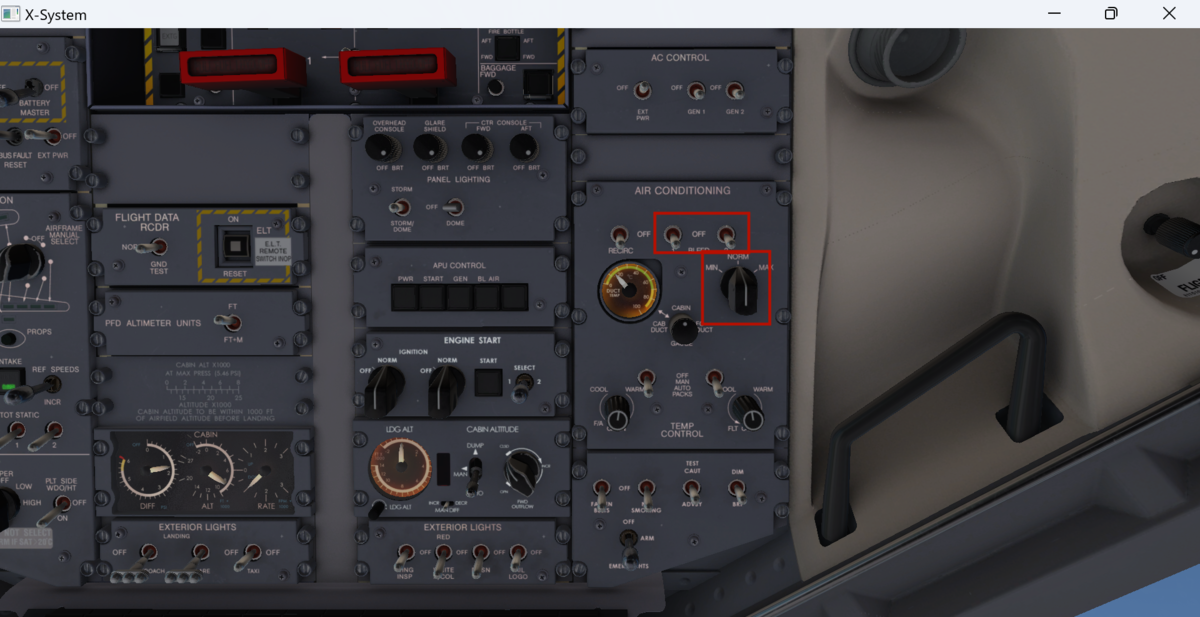
空調の設定をします。各エンジンのBLEED AIR(抽気)をON、ノブをNROMにして外気を機内に取り込み与圧します。これをしないと客室高度が上がり酸欠で気絶してします。
10000ftに到達したらランディングライトを消灯します。14000ftに到達したら高度計をSTD(29.92)にします。

指定高度に到達してレベルオフしています。ALTモードに入ります。

コンディションレバーをMIN/850に設定します。
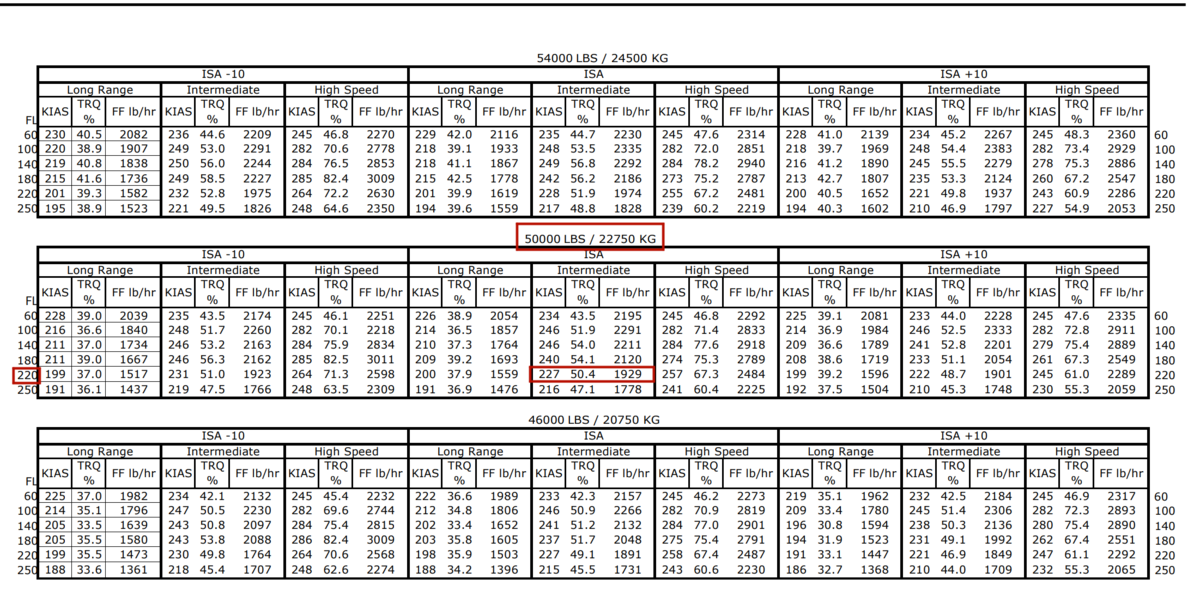
Majestic Q400のテーブルを参照します。FL220, 22750KGのエントリを参照すると227knot, 50.4Torque, 1929FFとあります。

MCRモードを起動します。最大巡航推力がセットされます。227knotになるまで最大推力のままにして、到達後はMCRをキャンセルしてTorqueを50.4になるようにパワーレバーを手動で調整します。

巡航中です。




降下の準備をします。CDUのVNAVページを開きTGT V/S(目標降下率)に1800と入力し、各ウェイポイントの通過予定高度を入力します。通過予定高度はSTARのチャートYARIIEを参考にします。

ウェイポイント高度の入力続きです。

機能の紹介です。DTOページはDirect To機能が利用でき、指定のウェイポイントに直行できます。今回は使用しません。

MBEを通過後、TODを迎えます。

TODに到達しました。ALTノブで降下高度11000ftを入力後、VNAVボタン、ALT SELボタンを押します。繰り返しですがALT SELを同時に押しておかないとALTノブで指定した高度は無視されます。

11000ft到達後も同じようにALTノブで高度を設定、VNAV、ALT SELボタンを押すを繰り返します。
14000ftを切ったらQNHを設定します。10000ftを切ったらランディングライトを点灯させます。
予備系統の油圧、燃料ポンプ、フェザーをONにします。
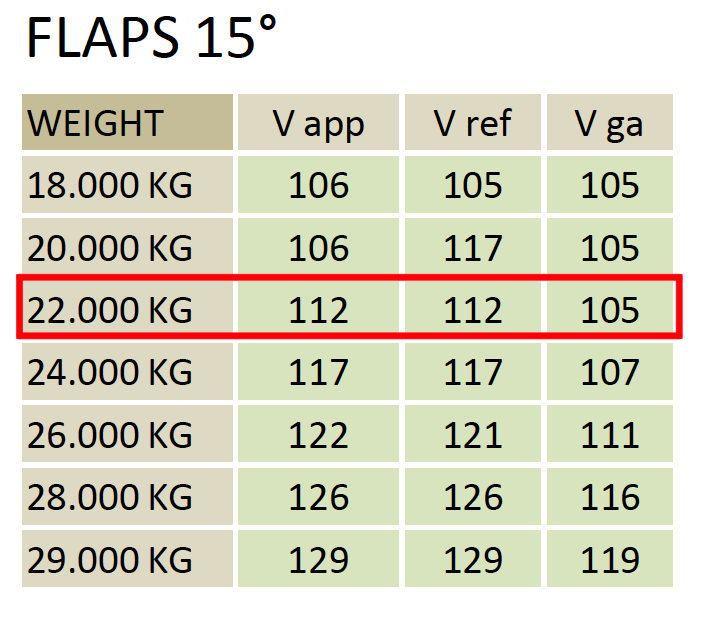
FLAP 15°の場合は112knotがアプローチ速度になります。アンチアイスを使用している場合は+20knotして使用してください。
コンディションレバーをMAX/1020に入れます。RDC Np LDNは実施しません。

いよいよアプローチです。今回はRNAVアプローチです。APPRボタンを押すとアプローチモードに入ります。PFDにAPPRと表示されるのを確認してください。RNAVは非精密誘導ですが、なかなかいい感じに水平・垂直方向を誘導してくれます。ILS・VORアプローチの場合はAPPRボタンが押されたタイミングでARMSの設置が上書きされます。

1000ftまでに最終フラップ、ギアダウンをしておきます。

タッチダウンしました!パワーレバーをリバースに入れて逆噴射&スポイラー展開します。
お疲れさまでした。
以上